





























EC590
Function parameters description
EC590
Function parameters description
-
65
-
-
66
-
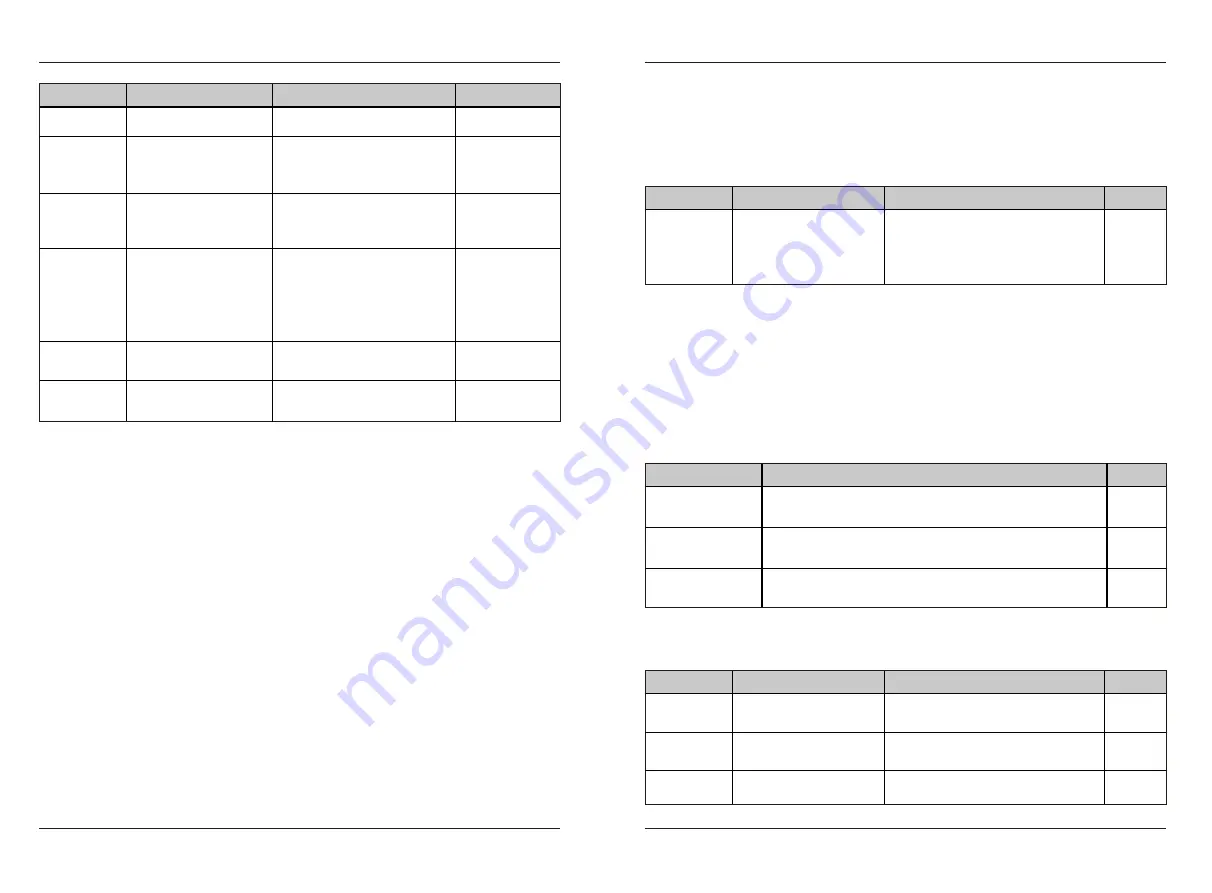
Function Code
Parameter Name
Default
F8-08
Deceleration time 4
Setting Range
Model dependent
0.0s to 6500.0s
F0-19
0:1s
1: 0.1s
2: 0.01s
1
Acceleration/Deceleration
time unit
Acceleration/Deceleration
time base frequency
0: Maximum frequency (F0-10)
1: Frequency reference
2: 100 Hz
F0-25
0
Acceleration/Deceleration
mode
0: Linear acceleration/deceleration
1: Static S-curve acceleration/
deceleration
2: Dynamic S-curve acceleration/
deceleration
F6-07
0
Time proportion of S-curve
start segment
0.0% to (100.0% – F6-09)
F6-08
30.0%
Time proportion of S-curve
end segment
0.0% to (100.0% – F6-08)
F6-09
30.0%
F6-07 sets acceleration/deceleration mode.
●
F6-07 = 0: Linear acceleration/deceleration
Output frequency increases or decreases linearly. The drive provides four groups of acceleration/
deceleration time, selected via F4-00 to F4-08.
●
F6-07 = 1: Static S-curve acceleration/deceleration
Output frequency increases or decreases along S curve on the condition that target frequency is
fixed. This mode is applied to applications where soft start or stop is required, such as elevator and
conveyor belt.
● F6-07 = 2: Dynamic S-curve acceleration/deceleration
Output frequency increases or decreases along S curve on the condition that target frequency is
changing at real time. This mode is applicable to applications requiring supreme riding comfort and
fast response.
F6-08 and F6-09 define time proportion of start segment and end segment of S-curve acceleration/
deceleration, respectively. They must satisfy F6-08 + F6-09 ≤ 100.0%.
5.4
Motor Auto-tuning
You can obtain parameters of controlled motor through motor auto-tuning.
Motor auto-tuning methods are static auto-tuning 1, static auto-tuning 2 and dynamic auto-tuning.
You can select a proper auto-tuning method in F1-37.
Function Code
Parameter Name
Default
F1-37
Motor auto-tuning method
selection
Setting Range
0
0: No auto-tuning
1: Static auto-tuning 1
2: Dynamic auto-tuning
3: Static auto-tuning 2
●
F1-37 = 0: Motor auto-tuning is not performed.
●
F1-37 = 1: Only stator resistance, rotor resistance and leakage inductance are obtained through
static auto-tuning 1.
●
F1-37 = 2: All motor parameters are obtained through dynamic auto-tuning. If the AC drive is in
FVC mode, you must make clear of encoder parameters (F1-27 to F1-34).
●
F1-37 = 3: All motor parameters are obtained through static auto-tuning 2.
The three motor auto-tuning methods are compared as follows:
Auto-tuning Method
Application
Default
Static auto-tuning 1
OK
It is applied to applications where motor cannot be disconnected
from load and dynamic auto-tuning is not allowed.
Dynamic auto-tuning
Best
It is applied to applications where motor can be disconnected from
load.
Static auto-tuning 2
Better
It is applied to applications where the motor cannot be disconnected
from the load and dynamic auto-tuning is not allowed.
Related parameters are described as follows:
Function Code
Parameter Name
Default
F1-00
Motor type selection
Setting Range
Model
dependent
0: Common asynchronous motor
1: Variable frequency asynchronous motor
F1-01
Rated motor power
Model
dependent
0.1 to 1000.0 kW
F1-02
Rated motor voltage
Model
dependent
1 to 2000 V







































































