





























Emotron VS Series Quick Start Guide
- 96 -
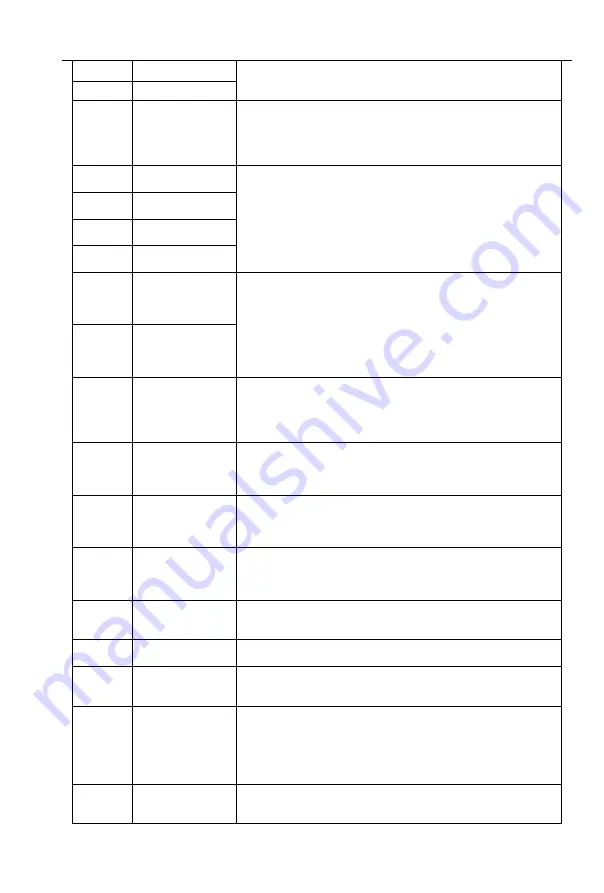
10
Terminal UP
If the frequency is determined by external terminals, the
Terminals with the two functions are used as increment and
decrement commands for frequency modification.
11
Terminal DOWN
12
UP and DOWN
setting
clear (terminal,
keypad)
If the frequency source is master frequency source setting, the
terminals used to clear the modification by using the
UP/DOWN function or the increment/decrement key on the
keypad, returning the set frequency to the value of master
frequency source setting.
13
Multi-reference
terminal 1
The setting of 16 speeds or 16 other references can be
implemented through combinations of 16 states of these four
terminals.
14
Multi-reference
terminal 2
15
Multi-reference
terminal 3
16
Multi-reference
terminal 4
17
Terminal 1 for
acceleration/
deceleration time
selection
Totally four groups of acceleration/deceleration time can be
selected through combinations of two states of these two
terminals.
18
Terminal 2 for
acceleration/
deceleration time
selection
19
Acceleration/Dec
eleration
prohibited
When “Accel/Decel disabled” terminal is enabled, the drive
maintains the present output frequency and no longer
responds to the change of command frequency. But it will
still perform ramp-down stop when receiving stop command.
This terminal is disabled during normal ramp-down stop.
20
Switch to
auxiliary
frequency source
setting
Switch integrated frequency source setting mode to auxiliary
frequency source setting mode.
21
PLC status reset
When simple PLC is running and this terminal is enabled. The
status (running time and step) of PLC will be cleared and the
output frequency is step 0. When this terminal is disabled
again, the drive resumes PLC running from step 0.
22
Simple PLC
paused
When simple PLC is running and this terminal is enabled, the
current PLC status (running time and step) will be memorized,
and the drive will run at 0Hz. When this terminal is disabled,
the drive restores its running from the memorized moment.
23
PID paused
When this terminal is enabled, PID adjustment is paused, and
the drive will maintain current output frequency. After this
terminal becomes disabled, PID adjustment recovers.
24
Reverse PID
action direction
After this terminal becomes ON, the PID action direction is
reversed to the direction set in F0.04.
25
PID integral
pause
After this terminal becomes ON, the integral adjustment
function pauses. However, the proportional and differentiation
adjustment functions are still valid.
26
PID parameter
switchover
When PID parameter switch is set to “2: switched by terminal”,
this terminal could be used to realize the switching between
two groups of PID parameters. When this terminal is enabled,
PID parameters are Kp1 and Ti1, Td1.
When this terminal is disabled, PID parameters are Kp2, Ti2
and Td2.
27
Swing frequency
pause(output the
current
The AC drive outputs the current frequency, and the swing
frequency function pauses.







































































