























Appendix A: Product Specifications
PreciseFlex™ DDR Collaborative Robots
P/N: PFD0-DI-00010, Rev 5.0.0, April 9, 2022
136
Copyright © 2022, Brooks Automation, Inc.
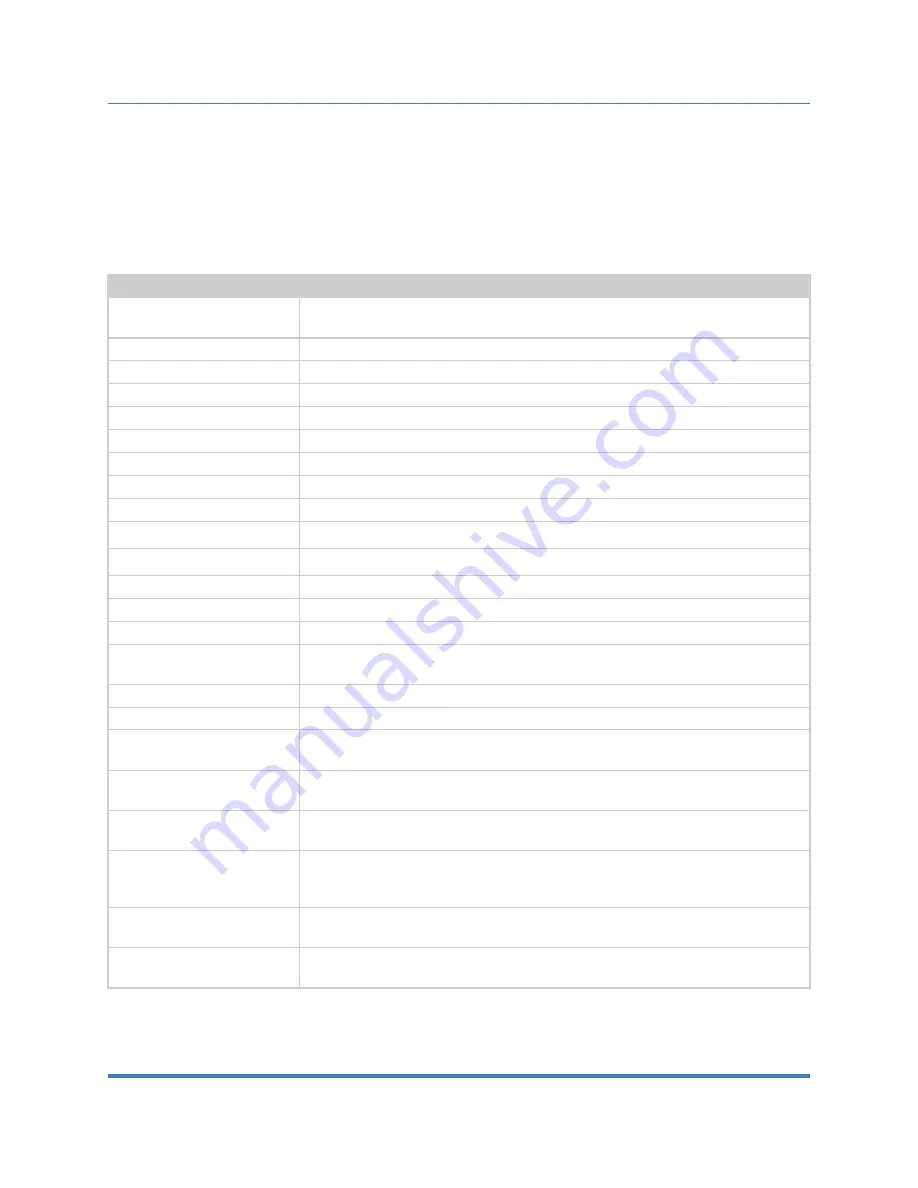
PFDD6 Specifications
General Specification
Range
Range of Motion &
Resolution
J1 (Base Rotation) Axis +/- 168 degrees
J2 Axis (Z column)
500mm, 1000mm, 1420mm
J3 Axis
+12 to +348 degrees
J4 Axis
+100, -220 degrees
J5 Axis
+/- 110 degrees
J6 Axis
+/- 295 degrees
23N Gripper Travel
74 to 133mm
Spring Gripper Force
2-23 Newtons closing, 2-10 Newtons opening, 7 Newtons power off
Resolution
10 microns typical
Repeatability
+/- 0.020 mm overall in X, Y & Z directions at 18-22C
Performance and Payload
Maximum acceleration
5000mm/sec
2
with 6kg payload
Maximum speed
600 mm/sec Cartesian, 140 degrees/sec J1, 360 degrees/sec J3
Controller
AVAILABLE PRECISEFLEX™
CONTROLLERS
: PreciseFlex™ PFD0,
PreciseFlex™ GSBP Slave Amp
Interfaces
General Communications
RS-232 channel, 100Mb Ethernet
Digital I/O Channels
12 optically isolated inputs and 8 isolated outputs available on facilities
panel at base. Remote I/O also available.
Pneumatic Lines
Two air lines, 75 PSI maximum, provided at outer link and routed internally
to fittings on the Facilities Panel.
Operator Interface
Web based operator interface supports local or remote control via browser
connected to embedded web server.
Programming Interface
Four methods available: DIO MotionBlocks (PLC), embedded Guidance
Programming Language (standalone), PC controlled over Ethernet using
TCP/IP, Guidance Motion: Graphical Programming Interface
Required Power
The PFDD robots power supplies have an input range of 100 to 240 VAC,
+/- 10%, 50/60 Hz, 700 watts peak maximum, 150-200 watts rms typical
Weight
45 kg for 500mm travel version, 55 kg for 1000mm version, 65 kg for
1420mm version






































































