





























Astraada DRV-24 frequency inverters Function Parameters
39
Functio
n code
Name
Detailed instruction of parameters
Defaul
t value
Modify
P02.28
Correction
coefficient
of motor 1
power
Correct the power displaying of motor 1.
Only impact the displaying value other than the
control performance of the inverter.
Setting range: 0.00~3.00
1.00
○
P03 Group Vector control
P03.00
Speed loop
proportiona
l gain1
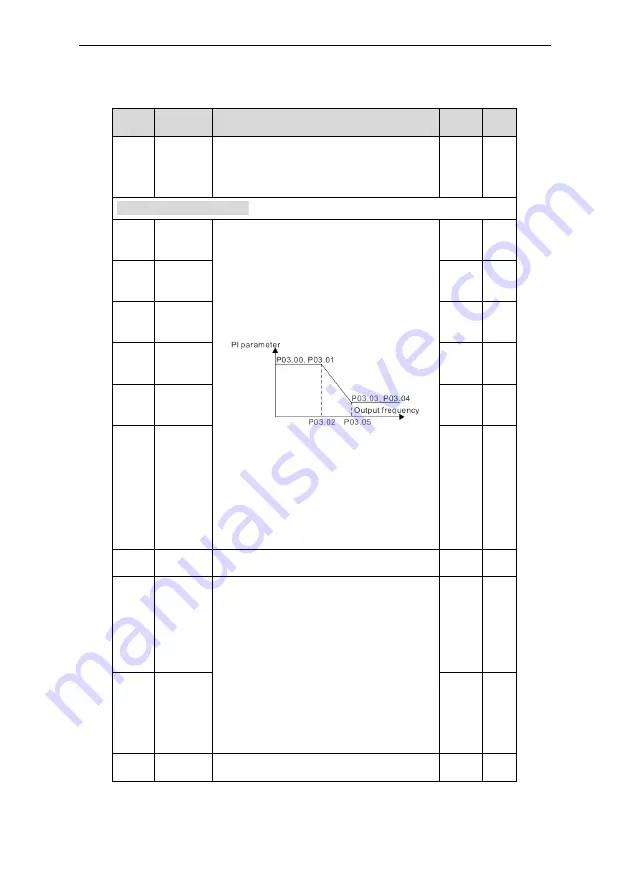
The parameters P03.00~P03.05 only apply to
vector control mode. Below the switching
frequency 1(P03.02), the speed loop PI
parameters are: P03.00 and P03.01. Above the
switching frequency 2(P03.05), the speed loop
PI parameters are: P03.03 and P03.04. PI
parameters are gained according to the linear
change of two groups of parameters. It is
shown as below:
PI has a close relationship with the inertia of
the system. Adjust on the base of PI according
to different loads to meet various demands.
The setting range of P03.00 and P03.03:
0~200.0
The setting range of P03.01 and P03.04:
0.000~10.000s
The setting range of P03.02: 0.00Hz~P00.05
The setting range of P03.05: P03.02~P00.03
20.0
○
P03.01
Speed loop
integral
time1
0.200s
○
P03.02
Low
switching
frequency
5.00Hz
○
P03.03
Speed loop
proportiona
l gain 2
20.0
○
P03.04
Speed loop
integral
time 2
0.200s
○
P03.05
High
switching
frequency
10.00H
z
○
P03.06
Speed loop
output filter
0~8( corresponds to 0~2
8
/10ms)
0
○
P03.07
Compensati
on
coefficient
of vector
control
electromoti
on slip
Slip compensation coefficient is used to adjust
the slip frequency of the vector control and
improve the speed control accuracy of the
system. Adjusting the parameter properly can
control the speed steady-state error.
Setting range:50%~200%
100%
○
P03.08
Compensati
on
coefficient
of vector
control
brake slip
100%
○
P03.09
Current
loop
Note:
These two parameters adjust the PI adjustment
1000
○
Summary of Contents for AS24DRV4075
Page 1: ...Operation Manual Astraada DRV 24 Frequency inverters ...
Page 2: ......







































































