





























TITAN-SVX Software Manual
page 36
Rev 4.01
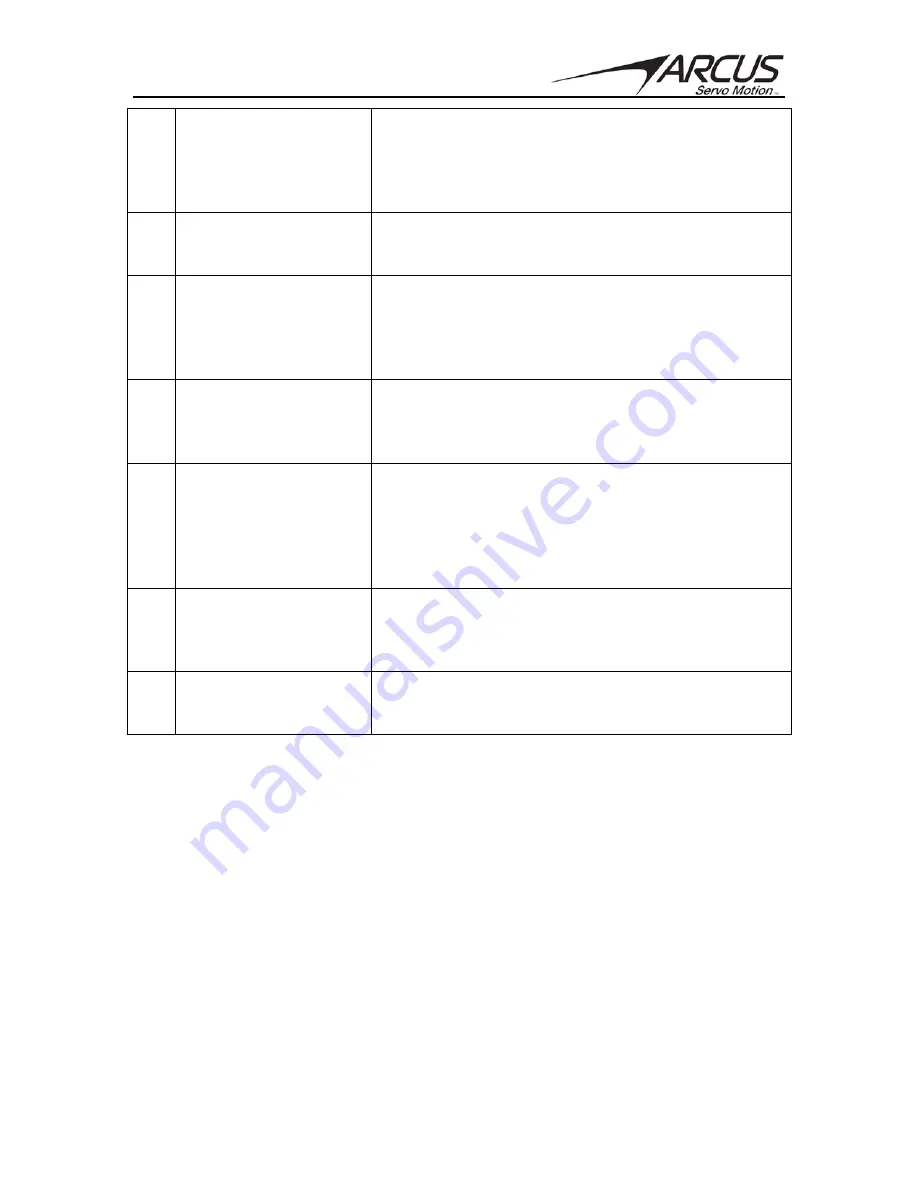
one or two of UVW should be on. When there is
no signal or all three hall sensor signals are on,
this fault is triggered. Hall Sensor error checking
is enabled all the time when the motor is
configured to use the Hall Sensor.
5
Peak Motor Current
Error
Peak Current has been triggered. The motor is
disabled when this error occurs. Peak Current
value can be changed using
OCUR
command.
6
Peak Supply Voltage
Error
Peak Power Supply Voltage has been triggered.
Typically, this happens when the back EMF of the
motor raises the power supply voltage. The motor
is disabled when this error occurs. Peak Voltage
value can be changed using
OVOL
command.
7
Under Power Supply
Voltage Error
Under Power Voltage has been triggered. The
motor is disabled when this error occurs. Under
Power Voltage value can be changed using
UVOL
command.
8
Overheat Error
Approximate FET temperature is measured and
the max threshold value is detected to trigger this
error if the temperature goes above
80 deg C
.
Use
TEMP
command to read the current
temperature. Use
UHEA
to read the threshold
temperature value.
9
Motor Connection
Error
The motor connection monitoring is done when
the motor is enabled. Actual and target current
and voltage values are monitored to determine if
the motor connection is not present.
10
Emergency Switch On Digital input 5 can be configured as Emergency
Input. When this input trigger is detected, the
motor is disabled and fault flag is set.
Table A.15
Notes:
•
FLT
is a read-only command.
•
Use
ECLEARX
command to clear the fault.
•
Use
MST
command to determine whether the motor is in fault or
not.







































































