



























- 79 -
UMC22-FBP
FieldBusPlug / Issue: 02.2008
V 6
Universal Motor Controller UMC22-FBP
Software version 4.0
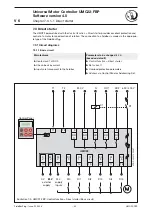
7.1.2 Description
7.1.2.1 Attached control functions
The only possible exceptions:
Fault output = On
:
The output DO2 = 1 if the internal fault signal is set.
Fault output = Off
:
Default. Output DO2 is controlled directly via the fi eldbus.
Multi-function input
: Some functions are available.
Remark:
All parameters are taken over immediately with the exception Control function that needs power up on
the UMC22.
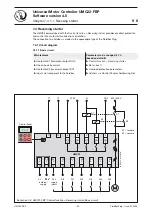
7.1.2.2 Fault behaviour
The internal fault bit is set only by faults in the mesuring part (all faults, e.g. trip, phase loss etc.) or by
low signal on DI2 if the parameter Fault input = On. In this case:
the monitoring signal FAULT is sent to the fi eldbus,
the red LED lights on,
the FAULT signal on the Control Panel fl ashes,
but the outputs DO0, DO1 and - depending on the parametrization - DO2 are controlled via fi eldbus
commands as before.
If a motor overload is the cause of the fault signal, the Cooling time is started additionally. The
Cooling
time
is a parameter and can be adjusted.
More detailed information are monitored in the diagnosis telegram and on the Control Panel.
All faults can be acknowledged via fi eldbus, via Control Panel or if parameterized via multi-function
inputs.
7.1.2.3 Addressing
(3.3.1)
The slave address of the UMC22-FieldBusPlug combination is not a parameter but can be set with
Control Panel or with separate Addressing Set.
Chapter 7.1.2~1 Transparent
Summary of Contents for UMC22-FBP
Page 167: ......







































































