


























- 122 -
UMC22-FBP
Universal Motor Controller UMC22-FBP
Software version 4.0
FieldBusPlug / Issue: 02.0008
V 6
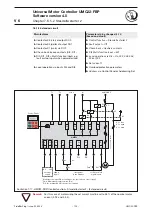
7.7.2.3 Check-back
(4.3.4)
When the motor is started the check-back status is expected within 300 ms, otherwise a fault is de-
tected. Selectable by parameter, current or auxiliary contact signal can serve as check-back status.
DI0 can not operate as Multi-function inputs when
Check-back = Auxiliary Contacts
is selected.
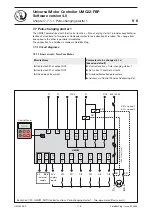
Remark:
Check-back = Simulation
is recommended only to be set via Control Panel during commissioning. The
control system must only set
Auxiliary contacts
or
Motor current
to guarantee that the check-back
operates correctly after next power on.
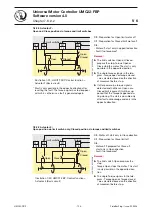
7.7.2.4 Fault behaviour
All kinds of detected external and internal faults set the internal fault bit. In the following:
contact DO0 (or DO1 resp.) for the contactor coil opens,
the monitoring signal FAULT is sent to the fi eldbus,
the red LED lights on and
the FAULT signal on the Control Panel display fl ashes.
If parameterized the output DO2 switches on.
If a motor overload is the cause of the fault signal, the cooling time is started additionally .
The cooling time is a parameter and can be adjusted. The running cooling time is shown on the
Control Panel with "°C".
All faults (except communication fault) must be acknowledged via fi eldbus (4.2.1), via Control Panel (8.1.3)
or if parameterized via multi-function inputs (4.3.4) to allow to start the motor.
Additional the cooling time (4.3.4) must have elapsed to allow to restart the motor with a 0
1 transiti-
on of the RUN command (4.2.1).
More detailed information are monitored in the diagnosis telegram (4.2.1) and on the Control Panel (8.2.1).
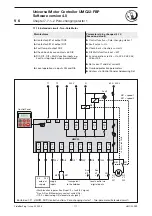
7.7.2.5 Addressing
(3.3.1)
The slave address of the UMC22-FieldBusPlug combination is not a parameter but can be set with
Control Panel (8.2.2) or with separate Addressing Set.
Chapter 7.7.2~3 Pole-changing starter 1
Summary of Contents for UMC22-FBP
Page 167: ......





















































