


























- 128 -
UMC22-FBP
Universal Motor Controller UMC22-FBP
Software version 4.0
FieldBusPlug / Issue: 02.0008
V 6
Chapter 7.8.2~2
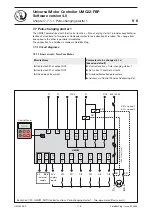
7.8.2.2 Actuator 2:
Open and Close position via torque and limit switches
DI0
13
24V
12
DI3
16
DI1
14
Open
Torque
Open,
Closed
Closed
2CDC 342 020 F0206
Limit switches
DI0: Preparation for Open limit motor off
DI1: Preparation for Closed limit motor off
DI3:
- Motor off, start only in opposite direction
- Fault if not prepared*
Remark:
The limit switches Open or Closed
prepare the stop. Torque Open or
Close stop the motor. The start is only
possible in the opposite direction.
The single torque signals in the tele-
gram - torque open or torque closed
- are calculated based on the direction
of movement before stop.
If after power-up a torque signal is
detected and neither an Open nor a
Closed limit is present it will be sup-
posed that the Torque happened du-
ring closing. The start is possible only
after fault acknowledge and only in the
opposite direction.
* Start is only possible in the opposite direction after
resetting the fault. The torque signal has to disappear
within 0.5 s otherwise a fault is generated again.
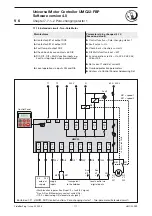
7.8.2.3 Actuator 3:
Open position via limit switch only, Closed position via torque and limit switches
DI0
13
24V
12
DI3
16
DI1
14
Open
Torque
Open,
Closed
Closed
2CDC 342 021 F0206
Limit switches
DI0: Motor off, start only in Close direction
DI1: Preparation for Close limit off
DI3:
- Motor off if prepared for Close off,
start only in Open direction
- Fault if not prepared*
Remark:
The limit switch Open prepares the
stop.
Torque Open stops the motor. The start
is only possible in the opposite direc-
tion
The single Torque signals in the tele-
gram - Torque open or Torque closed
- are calculated based on the direction
of movement before stop.
Illustration 7-29: UMC22-FBP: Control function =
Actuator 2 (Basic circuit)
Illustration 7-30: UMC22-FBP: Control function =
Actuator 3 (Basic circuit)
Summary of Contents for UMC22-FBP
Page 167: ......





















































