





























2 Displacement in x direction
3 Displacement in y direction
4 Displacement in z direction
Examples
This example shows the move instructions with offsets to move the robot in a
square (clockwise), starting at p10, with a 100 mm displacement in x and y.
MoveL p10, v50...
MoveL Offs(p10, 100, 0, 0), v50...
MoveL Offs(p10, 100, 100, 0), v50...
MoveL Offs(p10, 0, 100, 0), v50...
MoveL p10, v50...
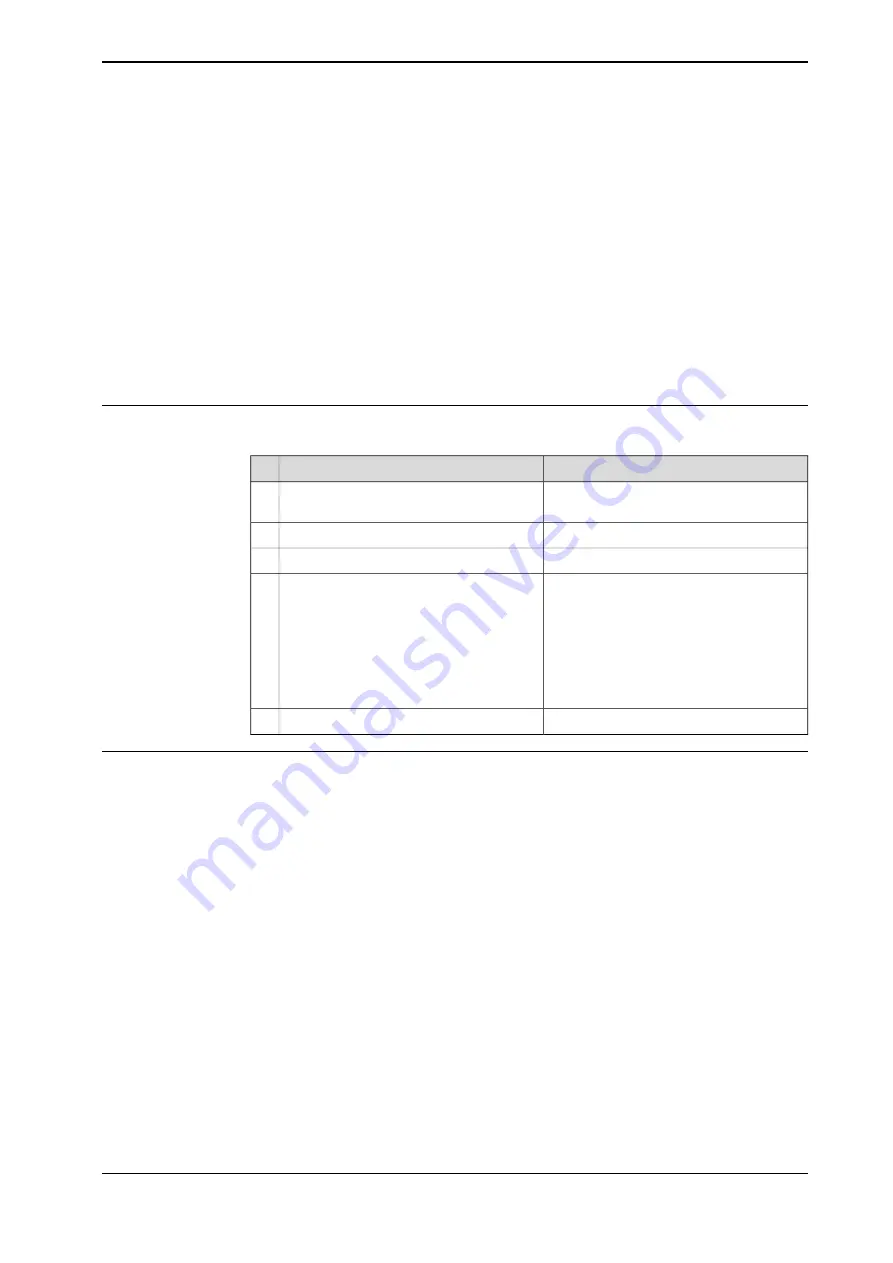
How to create position offsets
This procedure details how to change a position to become an offset position.
Information
Action
In the Program Editor, tap to select the
position argument to edit.
1
Tap
Edit
and then
Change Selected
.
2
Tap
Functions
and then
Offs
.
3
You can use the filter to narrow down the
available data. You can also change data
type of the available data.
Tap to select each expression,
<EXP>
, and
then tap any of the desired available data
or functions.
4
You can also tap
Edit
to access more
functions. Tap
All
to open the soft key-
board and edit all expressions at the same
time, or tap
Only Selected
to edit one at a
time with the soft keyboard.
Tap OK to save changes.
5
Related information
There are a number of functions in RAPID that may be useful. See
Technical
reference manual - RAPID Instructions, Functions and Data types
, and
Technical
reference manual - RAPID Overview
.
Operating manual - IRC5 with FlexPendant
273
3HAC050941-001 Revision: G
© Copyright 2018 ABB. All rights reserved.
6 Running in production
6.4.4 Working with displacements and offsets
Continued
Summary of Contents for IRC5 with FlexPendant
Page 1: ...ROBOTICS Operating manual IRC5 with FlexPendant ...
Page 14: ...This page is intentionally left blank ...
Page 120: ...This page is intentionally left blank ...
Page 146: ...This page is intentionally left blank ...
Page 240: ...This page is intentionally left blank ...
Page 286: ...This page is intentionally left blank ...
Page 294: ...This page is intentionally left blank ...
Page 298: ...This page is intentionally left blank ...
Page 304: ......
Page 305: ......