





























102
CHAPTER 5 - START-UP
5.3.2 Type of Control: Sensorless
or Vector with Encoder
(Operation Via Keypad
(HMI))
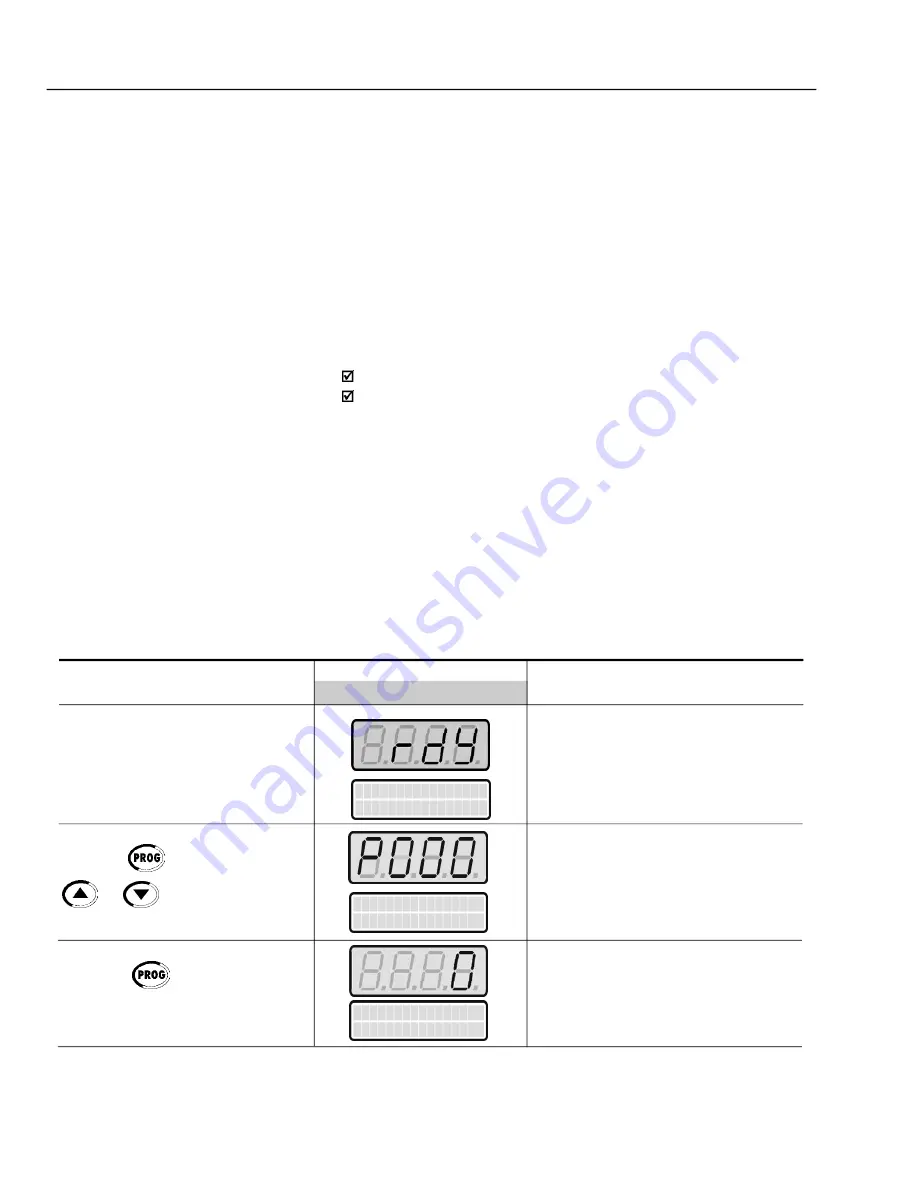
ACTION
LED DISPLAY
DESCRIPTION
LCD DISPLAY
Power-up the inverter
Inverter is ready to be enabled
VFD
ready
Enables the access to change
parameters content.
With the factory default programming
[P200 = 1 (Password Active)], P000
must be set to 5 to allow parameters
changes
Enter the programming mode
Press the
key. Press the keys
or
until P000 is
reached
Press the
key to enter the
programming mode
Param et er Access
P000 = 0
Param et er Access
P000 = 0
For the majority of the applications, the
Sensorless Vector
Control is
recommended. This mode permits an operation over a 100:1 speed range,
a speed control accuracy of 0.5 % (Refer to P412 - chapter 6), high torque
and fast dynamic response.
Another advantage of this type of control is a higher immunity to sudden
AC input voltage variation and load changes, thus avoiding nuisance tripping
due to overcurrent.
The adjustments necessary for a good sensorless control operation are
made automatically.
The
Vector Control with Encoder
Feedback offers the same advantages
as the Sensorless Control described above, with the following additional
benefits:
Torque and speed control down to zero speed (rpm);
Accuracy of 0.01 % in the speed control.
The closed loop vector control with encoder requires the use of the optional
board EBA or EBB for encoder connection - Refer to chapter 8.
OPTIMAL BRAKING:
This setting allows controlled motor braking within shortest possible
times without using other means, such as DC Link chopper with braking
resistor (for more details about this function refer to P151 – chapter 6).
The inverter is supplied with this function set at maximum. This means
that the braking is disabled. To enable the braking, set P151 according
to table 6.8.
The sequence below is based on the example in item 5.2.





















































