





























107
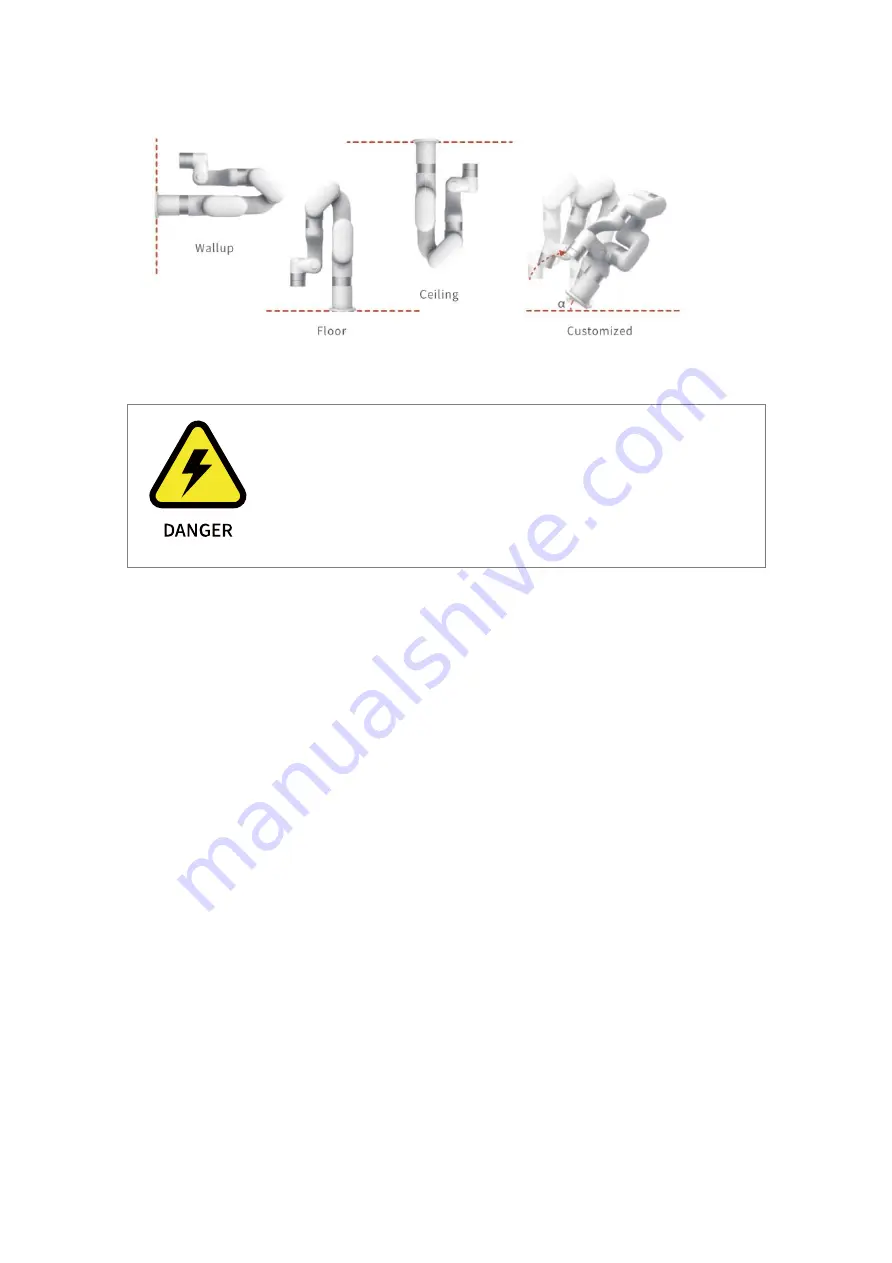
Make sure the robotic arm is properly placed according
to the actual use.
Must be mounted on a sturdy, shock-resistant surface
to avoid the risk of rollover of the robotic arm.
1.4.7 Timed Tasks
Timed tasks can schedule the offline task to run at a specific time or
within a time range in the future, without the need for an I/O triggering
signal. When using this function, please ensure the safety of the
equipment and personnel around the robotic arm within the timed
range.
Содержание xArm
Страница 1: ...1...
Страница 29: ...29 Working space of xArm7 unit mm Note The following working range diagrams are only for safety assessment...
Страница 78: ...78 Step3 Open the Properties Step4 Open the IPV4...
Страница 81: ...81 1 2 4 Return to the Search Interface PC Click Tool Search to return to the search interface...
Страница 116: ...116 1 4 9 3 Advanced Tools...
Страница 119: ...119 Friction Identification...
Страница 136: ...136 7 Restart the control box enter your modified IP in the xArm Studio search box and connect the robotic arm...





































































