





























68
3.1.3.
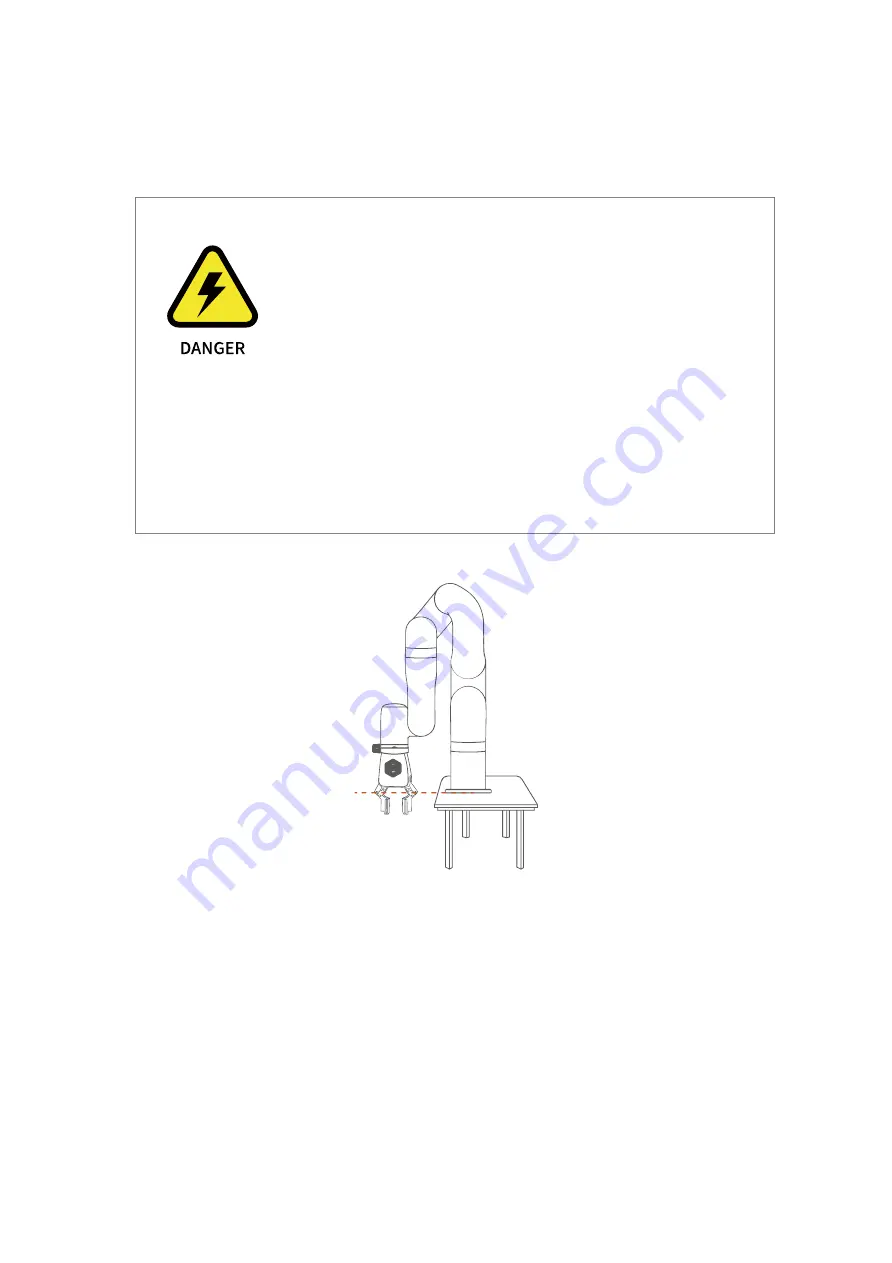
Precautions
1.
When the robotic arm is in the zero position, the
gripper will exceed the installation surface. Please
adjust the robotic arm to a posture suitable for
installing the gripper during installation.
2.When a robotic arm equipped with a gripper is used
for trajectory planning, it is necessary to perform a
safety assessment on whether to return to the zero-
point or whether the operation can be performed and to
avoid collisions.
The gripper of the robotic arm in the zero position will exceed the
mounting surface.
Note
:
For detailed instructions on the xArm gripper, please refer to the xArm
gripper user manual, download link:
Содержание xArm
Страница 1: ...1...
Страница 29: ...29 Working space of xArm7 unit mm Note The following working range diagrams are only for safety assessment...
Страница 78: ...78 Step3 Open the Properties Step4 Open the IPV4...
Страница 81: ...81 1 2 4 Return to the Search Interface PC Click Tool Search to return to the search interface...
Страница 116: ...116 1 4 9 3 Advanced Tools...
Страница 119: ...119 Friction Identification...
Страница 136: ...136 7 Restart the control box enter your modified IP in the xArm Studio search box and connect the robotic arm...






































































