





























94
shown in the above figure).
The current robotic arm must be mounted on a steady floor if automatic
identification is selected. The robotic arm needs to run a series of action
commands to calculate the parameters of TCP payload. In addition, it is
important to ensure the safety of equipment and personnel near the
robotic arm.
Note: Once the name of the new payload has been determined, it
cannot be changed.
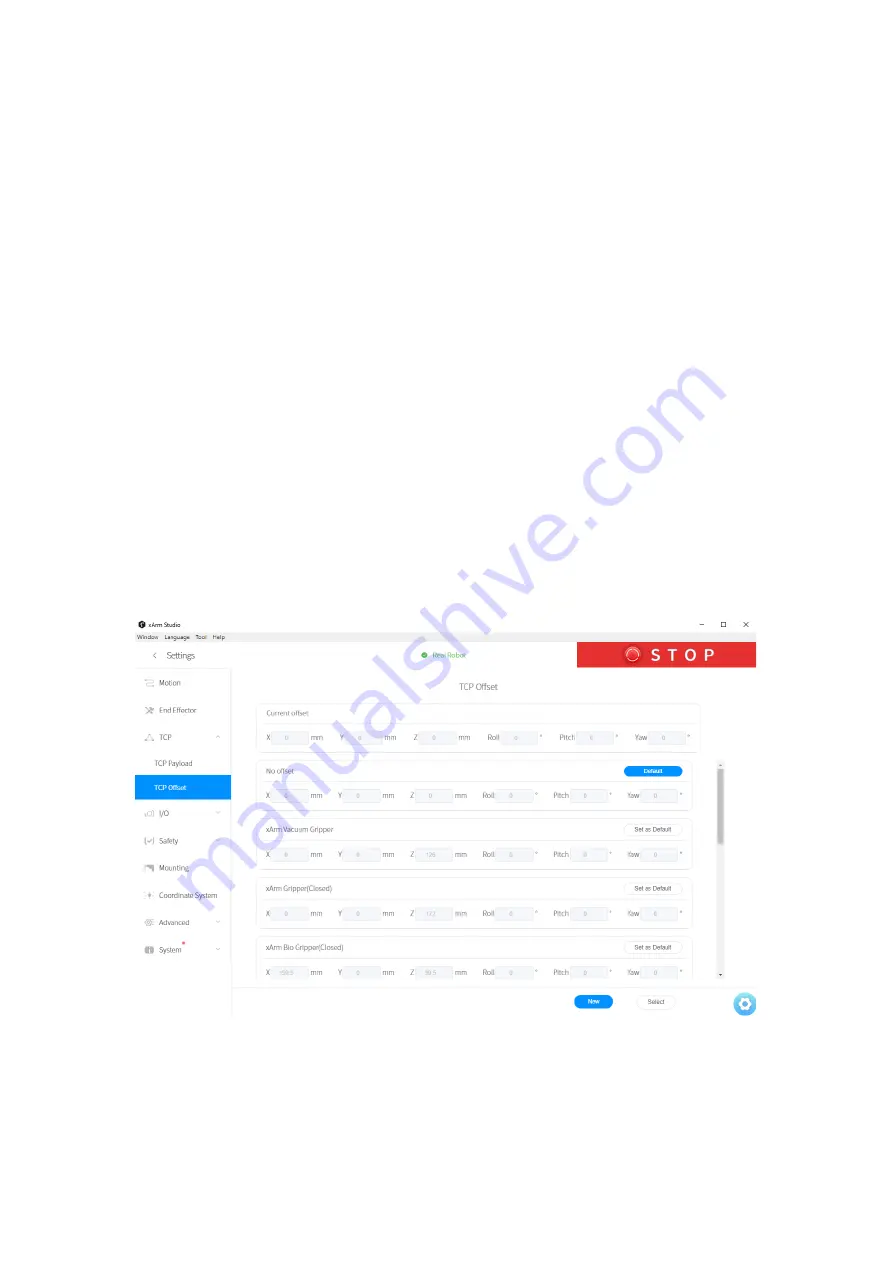
1.4.3.2 TCP Offset
On this page, the current offset of the robotic arm can be set and the
additional TCP offset data can be recorded. The additional TCP offset
Содержание xArm
Страница 1: ...1...
Страница 29: ...29 Working space of xArm7 unit mm Note The following working range diagrams are only for safety assessment...
Страница 78: ...78 Step3 Open the Properties Step4 Open the IPV4...
Страница 81: ...81 1 2 4 Return to the Search Interface PC Click Tool Search to return to the search interface...
Страница 116: ...116 1 4 9 3 Advanced Tools...
Страница 119: ...119 Friction Identification...
Страница 136: ...136 7 Restart the control box enter your modified IP in the xArm Studio search box and connect the robotic arm...







































































