How Autopilots Work
Sitex SP38 Installation and Operation
Document PN
29010101
V2r0
-
21
-
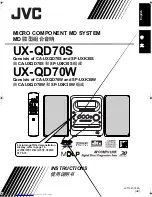
Wind and Current Effects
If your vessel encounters a crosswind, and/or a tidal current at any given angle to the
desired Heading, it will be pushed away, in the direction of the wind or current. At this point,
the autopilot will constantly be making Heading corrections with the rudder, as it tries to
maintain your desired Heading.
If that condition persists, the SPU will gradually begin to alter the rudder a few degrees to
Port or Starboard of the centred position, to counter the effect of the wind and/or current.
This feature, known as
Automatic Rudder Trim
, will keep your boat pointed in the right
direction, despite the wind or current.
However, one side-effect of Auto-Trim is that your boat may not follow the Track
you want;
it will maintain your desired Heading, but the Track may “slip” sideways in the direction of
the crosswind and/or current. This potential problem can be solved by using another mode
that
Sitex
Autopilots provide, which is the NAV
mode.
Following a Track: NAV Mode
So far, we have seen how an autopilot operates in AUTO
mode, whereas a new desired
Heading must be selected on the Control Head each time you wish to change direction.
This is useful for short trips or when you know the direct course to your destination.
But for longer trips, which often involve a number of “legs” at different headings, it would
be useful to be able to have your autopilot steer your boat along all the legs, in sequence.
Sitex
autopilots allow you to do just that, with NAV
mode.
The autopilot must be connected to an external source of navigation information (commands
and data), such as a chart plotter, or a Navigation program running on a PC. A source of
position data is also required, it may be built into the external Navigation System, or it may be
another device or system, like a GPS receiver (such as a
Sitex
GPS Compass), a LORAN C
receiver, etc. (all such external devices are in general referred to in this manual using the
generic term
Navigation System
).
Sitex
Autopilots implement the industry-standard NMEA 0183 protocol for reception and
transmission of navigation information. Almost all modern Navigation System
equipment complies with NMEA 0183, so interfacing with a
Sitex
autopilot is
relatively simple.
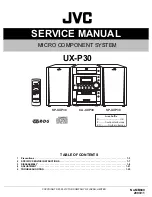
A long voyage will consist of a series of waypoints, which are specific locations on the
Earth’s surface, as defined by their Latitude and Longitude. These waypoints define the
route you want the boat to travel on, from your staring position to your destination. You
enter them into the external Navigation System when creating the route.
The system determines the current location of the boat (from the position data source),
and then calculates the course that must be steered in order to reach the next waypoint.
When the Autopilot is switched into NAV
mode, it begins to look for some specific
navigation information from the Navigation System: the course to steer to the next
waypoint, and the Cross-Track Error (which is the distance from the boat to the desired
Track, from the last waypoint to the next one). Using these two pieces of information, the
autopilot steers the boat on the shortest possible Track to the next waypoint.
Содержание SP38 Autopilot
Страница 2: ......
Страница 14: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 13 ...
Страница 15: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 14 Introduction ...
Страница 16: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 15 ...
Страница 25: ...System Overview Sitex SP38 Installation and Operation Document PN 29010101 V2r0 24 System Overview ...
Страница 26: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 25 ...
Страница 35: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 34 Installation ...
Страница 36: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 35 ...
Страница 73: ...Sitex SP38 Installation and Operation Basic Operation Document PN 29010101 V2r0 72 Basic Operations ...
Страница 74: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 73 ...
Страница 108: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 107 ...
Страница 109: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 108 Advanced Operations ...
Страница 110: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 109 ...
Страница 123: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 122 Care and Maintenance ...
Страница 124: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 123 ...
Страница 127: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 126 Appendices ...
Страница 128: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 127 ...
Страница 156: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 155 Warranty ...
Страница 157: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 156 User Notes and Settings ...
Страница 158: ...Sitex SP38 Installation and Operation Document PN 29010101 V2r0 157 ...
Страница 162: ...Sitex SP38 Installation and Operation User Notes and Settings Document PN 29010101 V2r0 161 User Notes ...