





























4 SBF Reference
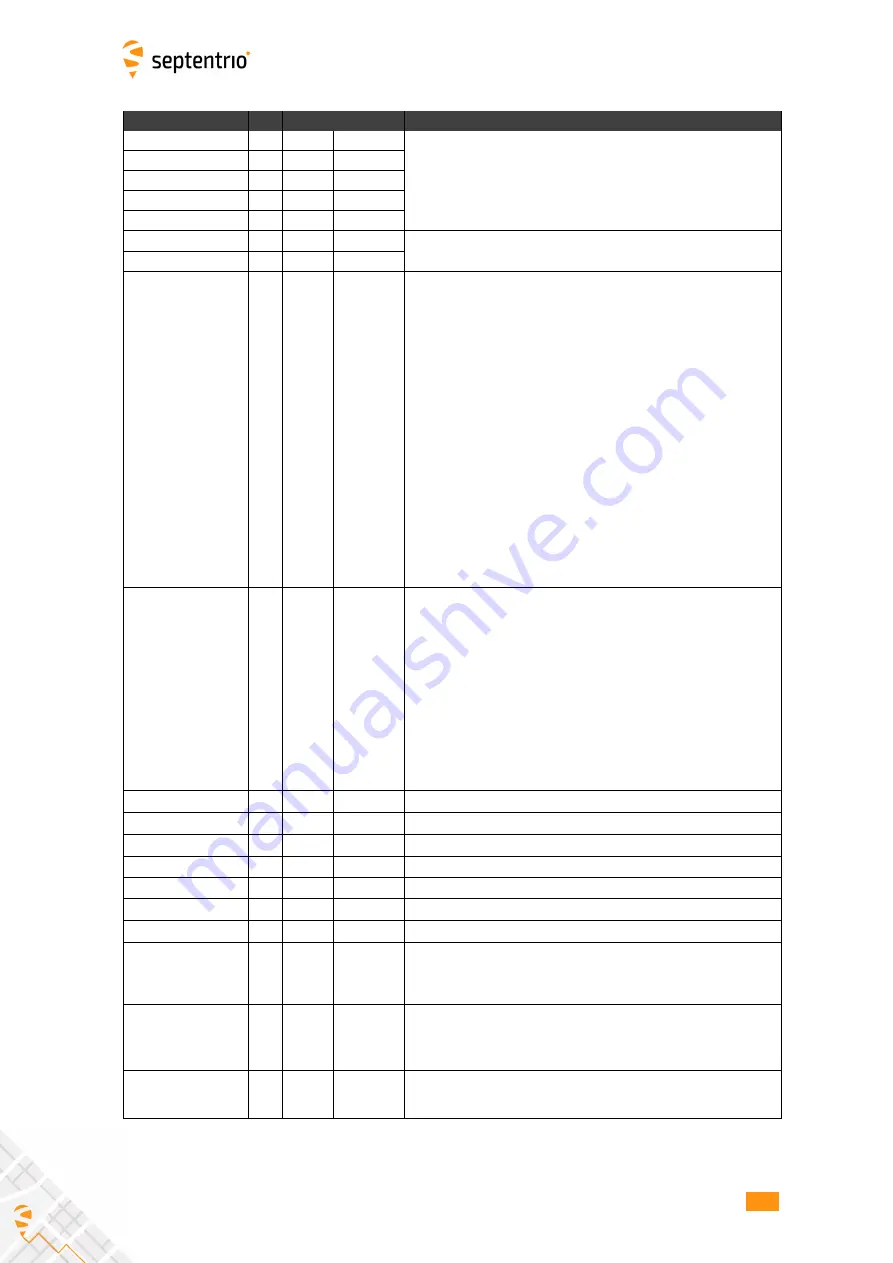
Parameter
Type Units
Do-Not-Use
Description
Sync1
c1
Block Header, see 4.1.1
Sync2
c1
u2
ID
u2
Length
u2
1
byte
u4
0.001
s
4294967295
Receiver time stamp, see 4.1.3
u2
1
week
65535
Mode
u1
Bit field indicating the GNSS PVT mode, as follows:
Bits 0-3:
type of PVT solution:
0:
Error
field indicates the
cause of the absence of the PVT solution)
1:
Stand-Alone PVT
2:
Differential PVT
3:
Fixed location
4:
RTK with fixed ambiguities
5:
RTK with float ambiguities
6:
7:
moving-base RTK with fixed ambiguities
8:
moving-base RTK with float ambiguities
10:
Precise Point Positioning (PPP)
12:
Reserved
Bits 4-5:
Reserved
Bit 6:
Set if the user has entered the command
and the receiver is still in the process of
determining its fixed position.
Bit 7:
2D/3D flag: set in 2D mode (height assumed constant and
not computed).
Error
u1
PVT error code. The following values are defined:
0:
No Error
1:
Not enough measurements
2:
Not enough ephemerides available
3:
DOP too large (larger than 15)
4:
Sum of squared residuals too large
5:
No convergence
6:
Not enough measurements after outlier rejection
7:
Position output prohibited due to export laws
8:
Not enough differential corrections available
9:
Base station coordinates unavailable
10:
Ambiguities not fixed and user requested to only output RTK-
fixed positions
Latitude
f8
1
rad
−
2
·
10
10
Latitude, from
−
π/
2
to
+
π/
2
, positive North of Equator
Longitude
f8
1
rad
−
2
·
10
10
Longitude, from
−
π
to
+
π
, positive East of Greenwich
Height
f8
1
m
−
2
·
10
10
Ellipsoidal height (with respect to the ellipsoid specified by
Datum
)
Undulation
f4
1
m
−
2
·
10
10
Geoid undulation. See the
command.
Vn
f4
1
m / s
−
2
·
10
10
Velocity in the North direction
Ve
f4
1
m / s
−
2
·
10
10
Velocity in the East direction
Vu
f4
1
m / s
−
2
·
10
10
Velocity in the ’Up’ direction
f4
1
degree
−
2
·
10
10
Course over ground: this is defined as the angle of the vehicle with
respect to the local level North, ranging from 0 to 360, and increasing
towards east. Set to the Do-Not-Use value when the speed is lower
than 0.1m/s.
RxClkBias
f8
1
ms
−
2
·
10
10
Receiver clock bias relative to the GNSS system time reported in the
TimeSystem
field. Positive when the receiver time is ahead of the sys-
tem time. To transfer the receiver time to the system time, use:
t
GPS
/
GST
=
t
rx
-
RxClkBias
RxClkDrift
f4
1
ppm
−
2
·
10
10
Receiver clock drift relative to the GNSS system time (relative frequency
error). Positive when the receiver clock runs faster than the system
time.
386
Содержание PolaRx5TR
Страница 1: ...PolaRx5TR Reference Guide Applicable to version 5 5 0 of the Firmware ...
Страница 73: ...3 Command Line Reference Chapter 3 Command Line Reference 73 ...
Страница 108: ...3 Command Line Reference COM1 gca Ch05 CR R gca Ch05 ChannelAllocation Ch05 G01 auto 0 16000 COM1 108 ...
Страница 130: ...3 Command Line Reference COM1 gim CR R gim IonosphereModel off COM1 130 ...
Страница 147: ...3 Command Line Reference PVTMode Static StandAlone SBAS DGPS RTKFloat RTKFixed Cartesian1 COM1 147 ...
Страница 218: ...3 Command Line Reference COM1 esoc COM1 MeasEpoch CR R esoc COM1 MeasEpoch SBFOnce COM1 MeasEpoch COM1 218 ...
Страница 237: ...3 Command Line Reference COM1 237 ...
Страница 251: ...3 Command Line Reference Event type Command etime 1588343730 before 1440 after 1440 Planned Disk DiskEvent COM1 251 ...
Страница 279: ...3 Command Line Reference COM1 279 ...
Страница 294: ...4 SBF Reference Chapter 4 SBF Reference 294 ...







































































