





























4 SBF Reference
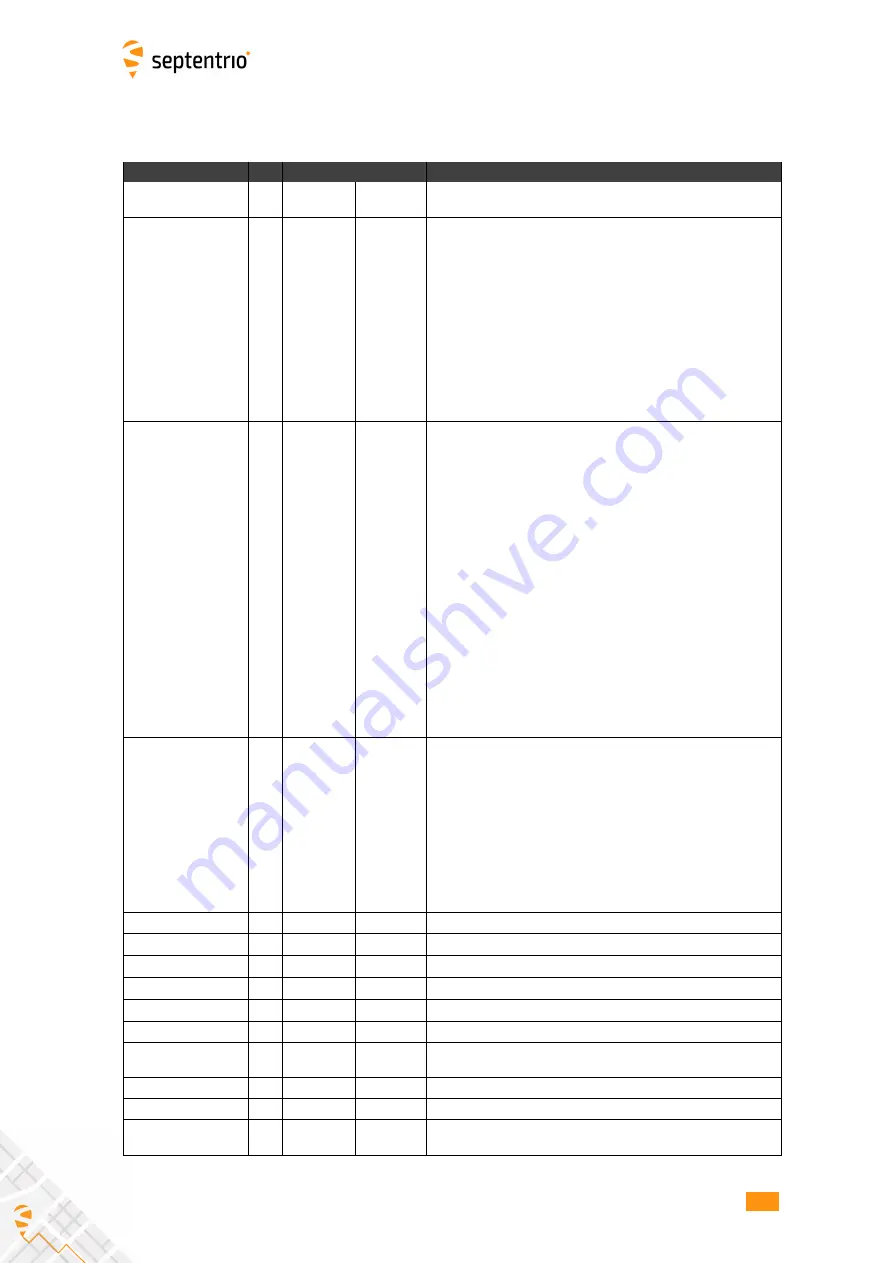
VectorInfoCart
sub-block definition:
Parameter
Type Units
Do-Not-Use
Description
nrSV
u1
Number of satellites for which corrections are available from the
base station identified by the
ReferenceID
field.
Error
u1
PVT error code. The following values are defined:
0:
No Error
1:
Not enough measurements
2:
Not enough ephemerides available
3:
DOP too large (larger than 15)
4:
Sum of squared residuals too large
5:
No convergence
6:
Not enough measurements after outlier rejection
7:
Position output prohibited due to export laws
8:
Not enough differential corrections available
9:
Base station coordinates unavailable
10:
Ambiguities not fixed and user requested to only output
RTK-fixed positions
Mode
u1
Bit field indicating the GNSS PVT mode, as follows:
Bits 0-3: type of PVT solution:
0:
Error
field indicates
the cause of the absence of the PVT solution)
1:
Stand-Alone PVT
2:
Differential PVT
3:
Fixed location
4:
RTK with fixed ambiguities
5:
RTK with float ambiguities
6:
7:
moving-base RTK with fixed ambiguities
8:
moving-base RTK with float ambiguities
10:
Precise Point Positioning (PPP)
12:
Reserved
Bits 4-5: Reserved
Bit 6:
Set if the user has entered the command
and the receiver is still in the process
of determining its fixed position.
Bit 7:
2D/3D flag: set in 2D mode (height assumed constant and
not computed).
Misc
u1
Bit field containing miscellaneous flags:
Bit 0:
Set if the baseline points to the base station ARP. Unset if
it points to the antenna phase center, or if unknown.
Bit 1:
Set if the phase center offset is compensated for at the
rover (i.e. the baseline starts from the antenna ARP), unset
if not or unknown.
Bit 2:
Proprietary.
Bit 3:
Proprietary.
Bits 4-5: Proprietary.
Bits 6-7: Reserved
DeltaX
f8
1
m
−
2
·
10
10
X baseline component (from rover to base)
DeltaY
f8
1
m
−
2
·
10
10
Y baseline component (from rover to base)
DeltaZ
f8
1
m
−
2
·
10
10
Z baseline component (from rover to base)
DeltaVx
f4
1
m / s
−
2
·
10
10
X velocity of base with respect to rover
DeltaVy
f4
1
m / s
−
2
·
10
10
Y velocity of base with respect to rover
DeltaVz
f4
1
m / s
−
2
·
10
10
Z velocity of base with respect to rover
Azimuth
u2
0.01
degrees
65535
Azimuth of the base station (from 0 to 360
◦
, increasing towards
east)
Elevation
i2
0.01
degrees
−
32768
Elevation of the base station (from -90
◦
to 90
◦
)
ReferenceID
u2
Base station ID
CorrAge
u2
0.01
s
65535
Age of the oldest differential correction used for this baseline com-
putation.
416
Содержание PolaRx5TR
Страница 1: ...PolaRx5TR Reference Guide Applicable to version 5 5 0 of the Firmware ...
Страница 73: ...3 Command Line Reference Chapter 3 Command Line Reference 73 ...
Страница 108: ...3 Command Line Reference COM1 gca Ch05 CR R gca Ch05 ChannelAllocation Ch05 G01 auto 0 16000 COM1 108 ...
Страница 130: ...3 Command Line Reference COM1 gim CR R gim IonosphereModel off COM1 130 ...
Страница 147: ...3 Command Line Reference PVTMode Static StandAlone SBAS DGPS RTKFloat RTKFixed Cartesian1 COM1 147 ...
Страница 218: ...3 Command Line Reference COM1 esoc COM1 MeasEpoch CR R esoc COM1 MeasEpoch SBFOnce COM1 MeasEpoch COM1 218 ...
Страница 237: ...3 Command Line Reference COM1 237 ...
Страница 251: ...3 Command Line Reference Event type Command etime 1588343730 before 1440 after 1440 Planned Disk DiskEvent COM1 251 ...
Страница 279: ...3 Command Line Reference COM1 279 ...
Страница 294: ...4 SBF Reference Chapter 4 SBF Reference 294 ...







































































