
























2 4
z
ZETA6104 Installation Guide
Mounting & Coupling the Motor
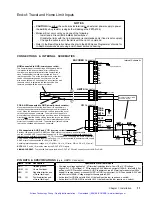
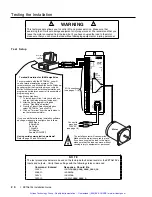
WARNINGS
¥
Improper motor mounting and coupling can jeopardize personal safety, and compromise system performance.
¥
Never disassemble the motor; doing so will cause contamination, significant reduction in magnetization, and loss of torque.
¥
Improper shaft machining will destroy the motorÕs bearings, and void the warranty. Consult a factory Applications Engineer
(see phone number on inside of front cover)
before
you machine the motor shaft.
Mounting the Motor
Use flange bolts to mount rotary step motors. The
pilot
, or centering flange on the motorÕs front face, can help you
position the motor.
Do not use a foot-mount or cradle configuration, because the motorÕs torque is not evenly distributed around the
motor case. When a foot mount is used, for example, any radial load on the motor shaft is multiplied by a much
longer lever arm.
The motors can produce very high torque and acceleration. If the mounting is inadequate, this combination of high
torque/high acceleration can shear shafts and mounting hardware. Because of shock and vibration that high
accelerations can produce, you may need heavier hardware than for static loads of the same magnitude.
Under certain move profiles, the motor can produce low-frequency vibrations in the mounting structure that can cause
fatigue in structural members. A mechanical engineer should check the machine design to ensure that the mounting
structure is adequate.
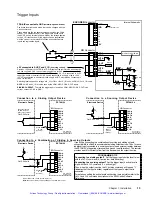
Motor Dimensions
(xxxx) denotes millimeters
1.856
(47.14)
2.27
(57.66)
max
1.502
1.498
(38.15)
(38.05)
120
0.215
0.195
(5.461)
(4.953)
dia (4)
on
2.625
(66.67) BC
(305) 8 wire
shielded
0.19
(4.83)
0.83
0.73
(21.08)
(18.54)
A
0.063
(1.60)
0.82
0.72
(20.83)
(18.29)
0.2500
0.2495
(6.35)
(6.34)
Shaft Dia (2)
1.118
(28.40) dia
60
#6-32 UNC-2B Thd
x 0.25 DP
(3) Equally Spaced
on 1.865 BC
(6.50)
(47.37)
Model
A
ZETA57-51
2.00
(1
150.23)
ZETA57-83
3.10
(1
175.23)
ZETA57-102
4.10
(101.60)
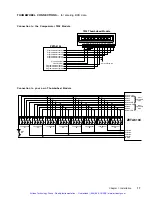
ZETA Series, 23 Frame
2.877
2.873
(73.07)
(72.97)
dia
3.25
(82.55)
max
2.730
2.750
(69.34)
(69.85)
3.40
(86.36)
Max Casting Size
120
(305)
8 wire
shielded
0.228
0.218
(5.79)
(5.54)
dia (4)
on
3.875
(98.42) BC
0.3750
0.3745
(9.52)
(9.51)
Shaft Dia (2)
0.19
(4.83)
A
0.063
(1.60)
1.21
1.17
(30.70)
(29.72)
1.23
1.15
(31.24)
(29.21)
30
0.750
x 0.050 Deep
Bore Min
(19.05)
dia
(1.27)
#6-32 UNC-2B Thd
x 0.25 DP
(4) Equally Spaced
on 2.952 BC
(6.50)
(74.98)
Model
A
ZETA83-62
2.50
(1
162.00)
ZETA83-93
3.70
(1
193.98)
ZETA83-135
4.10
(129.00)
ZETA Series, 34 Frame
2.44
(61.98)
10
¡
18.0
(457.2)
min.
1.06
(26.92)
2
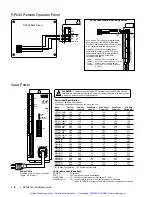
Motor painted black
1
Flexible rubber boot may be bent
as shown. Nominal height 1.0 (25.4)
0.72
(18.29)
max.
0.20
(5.08)
0.055
(1.40)
0.81
(20.57)
Lmax.
0.75
(19.05)
13.5
(342.9)
0.25
(6.35)
0.2500
+
-
0.0000
0.0005
Encoder (optional)
(6.35
+
-
0.000)
0.127)
-B-
0.002 (0.05)
0.003 (0.076) -B-
0.003 (0.076) -A-
0.2500
+
-
0.0000
0.0005
(6.35
+
-
0.000)
0.127)
-A-
0.002 (0.05)
1
Model
Lmax
OS2HB
1.60
(40.70)
OS21B
2.06
(52.40)
OS22B
3.10
(78.80)
O Series, 23 Frame
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Содержание Compumotor ZETA6104
Страница 45: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Страница 49: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Страница 53: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Страница 63: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...







































































