
























3 0
z
ZETA6104 Installation Guide
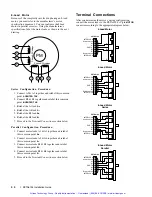
Record Your SystemÕs Configuration
You may wish to record your configuration information in the chart below.
P
S
Axis Name
Motor Size
Motor Inductance Setting (DMTIND)
Motor Static Torque Setting (DMTSTT)
Waveform Setting (DWAVEF)
Electronic Viscosity Setting (DELVIS)
Active Damping Setting (DACTDP)
Anti-Resonance Enabled? (DAREN1)
Current Standby Enabled? (DAUTOS1)
COM 1 Serial Port Function
COM 2 Serial Port Function
RS-485 Resistor Values
Yes
Yes
No
No
RS-232
RP240
RS-232
Terminate
Bias
RP240
RS-485
DIP Switch Settings
OFF
ON
1 2 3 4 5 6 7 8 9 10 11 12
¬
COM port functions set with internal jumpers
and the
PORT
and
DRPCHK
commands.
¬
RS-485 resistors are selected with internal DIP
switches, or connected externally.
This chart is repeated, along with other facts, on the
magnetic
information label located on the
side of the ZETA6104 chassis. You can leave the label on the ZETA6104, or you can remove it
and place it in a convenient location near the ZETA6104 (e.g., on an equipment cabinet door).
Use a marker or pen to write configuration information in the spaces at the bottom of the label.
If you have multiple ZETA6104s, you can remove the labels and stack them on top of each
other, with the bottom edge of each visible. This shows information about all axes at a glance.
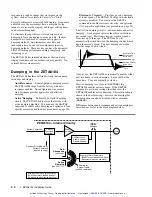
Recommended Set-up Program Elements
N O T E
In most applications,
the factory default
settings are adequate.
Most of the software configuration commands (see table below) are not saved in non-volatile
memory and therefore must be executed every time the ZETA6104 is powered up or reset.
Therefore, you may wish to include the software configuration commands in the
set-up
program.
The set-up program is automatically executed when the ZETA6104 is powered up or reset; in it,
you place the configuration commands that establish the operational readiness you require for
your particular application. A sample set-up program is provided below. For more detailed
information on creating a set-up program, refer to the
6000 Series ProgrammerÕs Guide
.
Command
Function
Factory Default Setting
DACTDP
Enable/disable active damping. Active damping is automatically inhibited at or
below 3 rps. If active damping is enabled, anti-resonance is automatically
inhibited. (See set-up procedure on page 26.)
DACTDP¯
(disabled)
DAREN
Enable/disable anti-resonance. Anti-resonance is automatically inhibited at or
below 3 rps, and it is inhibited if active damping is enabled.
DAREN1
(enabled)
DAUTOS
Enable/disable automatic current standby mode in which current to the motor is
reduced to 50% if no pulses are commanded for 1 second. Full current is restored
upon the next pulse command.
DAUTOS¯
(disabled)
DELVIS
Enable/disable electronic viscosity. Electronic viscosity is automatically inhibited
above 3 rps. (See set-up procedure on page 29.)
DELVIS¯
(disabled)
DMTIND
Match the inductance of your motor (used only for active damping).
DMTIND1
(
³
20 MH) *
DMTSTT
Match the motorÕs static torque (used only for active damping).
DMTSTT1
(0.26-0.72 N-m; 36-100 Oz-in) *
DRPCHK
Establish the type of check for an RP240. In general, this command is necessary
only if you are using RS-485, which forces the RP240 to be connected to the
COM
1
connector, instead of being connected to the
COM 2
connector.
DRPCHK3
*
DWAVEF
Match the motor waveform (required for matching the motor to the ZETA6104).
DWAVEF1
(-4% 3rd harmonic)
ECHO
Enable/disable echoing of characters. If communicating over RS-232 to the
master ZETA6104 in an RS-485 multi-drop, see setup requirements on page 36.
ECHO1
(enabled; but if using RS-485,
COMÊ2
is changed to
ECHO¯
by default)
PORT
Identify the COM port to be affected by subsequent serial communication set-up
commands (
DRPCHK
,
E
,
ECHO
,
EOT
,
BOT
,
EOL
,
ERROK
,
ERRBAD
,
ERRDEF
,
XONOFF
, and
ERRLVL
).
PORT1
(
COM 1
is affected)
* These commands are automatically saved in non-volatile memory.
If ordered as a system (with a motor), the ZETA6104 is shipped with the
DMTIND
and
DMTSTT
commands set to match the motor.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Содержание Compumotor ZETA6104
Страница 45: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Страница 49: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Страница 53: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Страница 63: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...





















































