
























Chapter 1. Installation
1 1
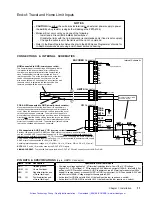
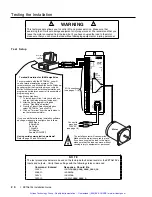
End-of-Travel and Home Limit Inputs
N O T E S
¥
CAUTION
:
Use
either
the on-board
+5V
terminal
or
an external power supply to power
the
AUX-P
pull-up resistor (using both will damage the ZETA6104).
¥ Motion will not occur until you do one of the following:
- Install end-of-travel (
POS
&
NEG
) limit switches.
- Disable the limits with the
LH¯
command (recommended only if load is not coupled).
- Change the active level of the limits with the
LHLVL
command.
¥ Refer to the Basic Operation Setup chapter in the 6000 Series ProgrammerÕs Guide for
in-depth discussions about using end-of-travel limits and homing.
CONNECTIONS & INTERNAL SCHEMATICS
Internal Schematic
POS & NEG connected to GND
(normally-closed switches).
Mount each switch such that the load forces it to open before it
reaches the physical travel limit (leave enough room for the load to
stop). When the load opens the switch, the axis stops at the decel
value set with the
LHAD
command. The motor will not be able to
move in that same direction until you execute a move in the opposite
direction and clear the limit by closing the switch (or you can disable
the limits with the
LH¯
command, but this is recommended only if the
motor is not coupled to the load). The active level (default is active
low) can be changed with the
LHLVL
command.
HOM connected to GND
(normally-open switch).
The home limit input is used during a homing move, which
is initiated with the
HOM
command. After initiating the
homing move, the controller waits for the home switch to
close, indicating that the load has reached the ÒhomeÓ
reference position. The active level (default is active low)
can be changed with the
HOMLVL
command. You can
also use an encoderÕs Z channel pulse, in conjunction with
the home switch, to determine the home position (this
feature is enabled with the
HOMZ1
command).
Chassis Ground
GND
HOM
NEG
POS
Iso Ground
SHLD
GND
Z-
Z+
B-
B+
A-
A+
+5V
I/O
Connector
LIMITS
Connector
ENCODER
Connector
+5V connected to AUX-P and V_I/O
(sourcing current).
Pr5V power to the POS, NEG, and HOM input pull-up resistors. As an alternative,
you can connect AUX-P to an external supply of up to +24V (but do not use both the on-board +5V
terminal and an external 5-24V supply). If V_I/O is connected to a +5V supply (on-board or external),
AUX-P can be connected to a supply of up to +24V. If V_I/O is connected to an ex24V supply,
AUX-P must also be connected to +24V (or to GND).
Switching levels depend on voltage at V_I/O (LOW
£
1/3 of V_I/O volts; HIGH
³
2/3 of V_I/O volts).
NOTE
: AUX-P and V_I/O are also used by the P-CUT & TRG inputs.
SINKING CURRENT
: To make the limit inputs (as well as P-CUT & TRG) sink current, connect AUX-P to GND.
TRG-A
TRG-B
OUT-A
GND
P-CUT
+5V
OUT-P
IN-P
AUX-P
V_I/O
6.8 K
W
12.1 K
W
+5VDC
20.0 K
W
18.2 K
W
10.0 K
W
LM 339
30.1 K
W
Similar circuits for NEG
and POS inputs.
Iso
Ground
PIN OUTS & SPECIFICATIONS
(4-pin LIMITS Connector)
Name
In/Out
Description
Specification for all limit inputs
GND
HOM
NEG
POS
Ñ
IN
IN
IN
Isolated ground.
Home limit input.
Negative-direction end-
of-travel limit input.
Positive-direction end-
of-travel limit input.
¥ Powered by voltage applied to V_I/O terminal (switching levels: Low
£
1/3 of V_I/O voltage,
High
³
2/3 of V_I/O voltage). V_I/O can handle 5-24V with max. current of 100mA. Internal 6.8 K
W
pull-ups to AUX-P terminalÑconnect AUX-P to power source (+5V terminal or an external 5-24V
supply) to source current, or connect AUX-P to GND to sink current; AUX-P can handle 0-24V with
max. current of 50mA. Voltage range for these inputs is 0-24V.
¥ Active level for HOM is set with
HOMLVL
(default is active low, requires n.o. switch).
¥ Active level for POS & NEG is set with
LHLVL
(default is active low, requires n.c. switch).
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Содержание Compumotor ZETA6104
Страница 45: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Страница 49: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Страница 53: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Страница 63: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...







































































