
























Chapter 1. Installation
2 7
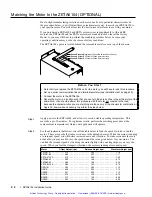
Step 2
Establish appropriate inductance and static torque settings.
If you ordered a
ZETA6104 and a ZETA motor together as a ÒsystemÓ, these settings were made at the factory
(OS and RS motors may not be ordered as a ÒsystemÓ). Use the
DMTIND
command to set the
inductance, and use the
DMTSTT
command to set the static torque (see table below). The
DMTIND
and
DMTSTT
values are automatically saved in battery-backed RAM.
Motor
--- INDUCTANCE ---
Range
DMTIND
MH
Setting
--- STATIC TORQUE ---
Range
DMTSTT
N-m
Oz-in
Setting
ZETA57-51(S)
20.08 & greater
DMTIND1
*
0.26 Ð 0.72
36 Ð 100
DMTSTT1
*
ZETA57-51(P)
5.03 Ð 10.30
DMTIND3
0.26 Ð 0.72
36 Ð 100
DMTSTT1
*
ZETA57-83(S)
20.08 & greater
DMTIND1
*
0.26 Ð 0.72
36 Ð 100
DMTSTT1
*
ZETA57-83(P)
5.03 Ð 10.30
DMTIND3
0.26 Ð 0.72
36 Ð 100
DMTSTT1
*
ZETA57-102(S)
20.08 & greater
DMTIND1
*
0.73 Ð 1.41
101 Ð 200
DMTSTT2
ZETA57-102(P)
5.03 Ð 10.30
DMTIND3
0.73 Ð 1.41
101 Ð 200
DMTSTT2
ZETA83-62(S)
10.31 Ð 20.07
DMTIND2
0.73 Ð 1.41
101 Ð 200
DMTSTT2
ZETA83-62(P)
less than 5.02
DMTIND4
0.73 Ð 1.41
101 Ð 200
DMTSTT2
ZETA83-93(S)
10.31 Ð 20.07
DMTIND2
1.42 Ð 2.33
201 Ð 330
DMTSTT3
ZETA83-93(P)
less than 5.02
DMTIND4
1.42 Ð 2.33
201 Ð 330
DMTSTT3
ZETA83-135(S)
10.31 Ð 20.07
DMTIND2
2.34 Ð 3.48
331 Ð 492
DMTSTT4
ZETA83-135(P)
less than 5.02
DMTIND4
1.42 Ð 2.33
201 Ð 330
DMTSTT2
OS2HB(S)
5.03 Ð 10.30
DMTIND3
0.26 Ð 0.72
36 Ð 100
DMTSTT1
*
OS2HB(P)
less than 5.02
DMTIND4
0.26 Ð 0.72
36 Ð 100
DMTSTT1
*
OS21B(S)
10.31 Ð 20.07
DMTIND2
0.26 Ð 0.72
36 Ð 100
DMTSTT1
*
OS21B(P)
less than 5.02
DMTIND4
0.26 Ð 0.72
36 Ð 100
DMTSTT1
*
OS22B(S)
10.31 Ð 20.07
DMTIND2
0.73 Ð 1.41
101 Ð 200
DMTSTT2
OS22B(P)
less than 5.02
DMTIND4
0.73 Ð 1.41
101 Ð 200
DMTSTT2
RS31B(S)
10.31 Ð 20.07
DMTIND2
0.73 Ð 1.41
101 Ð 200
DMTSTT2
RS31B(P)
less than 5.02
DMTIND4
0.73 Ð 1.41
101 Ð 200
DMTSTT2
RS32B(S)
10.31 Ð 20.07
DMTIND2
1.42 Ð 2.33
201 Ð 330
DMTSTT3
RS32B(P)
less than 5.02
DMTIND4
1.42 Ð 2.33
201 Ð 330
DMTSTT3
RS33B(S)
5.03 Ð 10.30
DMTIND3
2.34 Ð 3.48
331 Ð 492
DMTSTT4
RS33B(P)
less than 5.02
DMTIND4
2.34 Ð 3.48
331 Ð 492
DMTSTT4
(S) = Series Connection; (P) = Parallel Connection
* = Factory default setting (unless you ordered the ZETA6104 with a ZETA motor as a ÒsystemÓ).
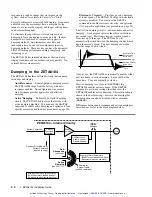
Step 3
Calculate only the maximum Active Damping (
D A C T D P
) setting.
C A U T I O N
The purpose of this step is to identify the maximum
DACTDP
value for your system
Ð
DO NOT
enter the
DACTDP
command now
. In steps 5-7 of this procedure, never set the
DACTDP
value
higher than this maximum setting.
To calculate the maximum
DACTDP
value, first calculate your systemÕs
total
inertia (include
the motorÕs rotor inertiaÑsee table on page 3). Then consult the table of inertia ranges below
to find the
DACTDP
setting that corresponds to your systemÕs total inertia. If you are on the
boundary between two settings, pick the lower of the two numbers.
DACTDP
Setting
Total Inertia kg-cm
2
Total Inertia kg-m
2
x 10
-6
Total Inertia oz-in
2
DACTDP15
0.088
to
0.205
8.8
to
20.5
0.481
to
1.121
DACTDP14
0.205
to
0.572
20.5
to
57.2
1.121
to
3.144
DACTDP13
0.572
to
1.069
57.2
to
106.9
3.127
to
5.845
DACTDP12
1.069
to
1.754
106.9
to
175.4
5.845
to
9.590
DACTDP11
1.754
to
2.727
175.4
to
272.7
9.590
to
14.910
DACTDP1¯
2.727
to
3.715
272.7
to
371.5
14.910
to
20.312
DACTDP9
3.715
to
5.020
371.5
to
502.0
20.312
to
27.447
DACTDP8
5.020
to
6.275
502.0
to
627.5
27.447
to
34.308
DACTDP7
6.275
to
8.045
627.5
to
804.5
34.308
to
43.986
DACTDP6
8.045
to
9.595
804.5
to
959.5
43.986
to
52.460
DACTDP5
9.595
to
11.760
959.5
to
1176.0
52.460
to
64.297
DACTDP4
11.760
to
14.250
1176.0
to
1425.0
64.297
to
77.884
DACTDP3
14.250
to
15.900
1425.0
to
1590.0
77.884
to
86.905
DACTDP2
15.900
to
17.770
1590.0
to
1777.0
86.905
to
97.129
DACTDP1
17.770
to
20.570
1777.0
to
2057.0
97.129
to 112.465
DACTDP¯
Active Damping Disabled (factory default)
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Содержание Compumotor ZETA6104
Страница 45: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Страница 49: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Страница 53: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Страница 63: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...





















































