





























17-17
17-4-5. Overrun release
The robot is provided with software that monitors the operating range and stops the rbot operation when an axis reaches
the soft-limit. However, if an arm moves beyond its soft-limit, the robot detects the overrun error of the arm electrically
and shut off the servo power for safe operation.
To restart the robot, it is necessary to disable the overrun monitor temporary and correct the error condition. It is called
“Overrun release”.
Overrun release procedure
During the overrun release procedure, the robot arm moves at low speed.
Work with caution and pay attention to the direction of the movement of the axis.
Turn OFF the power to the controller.
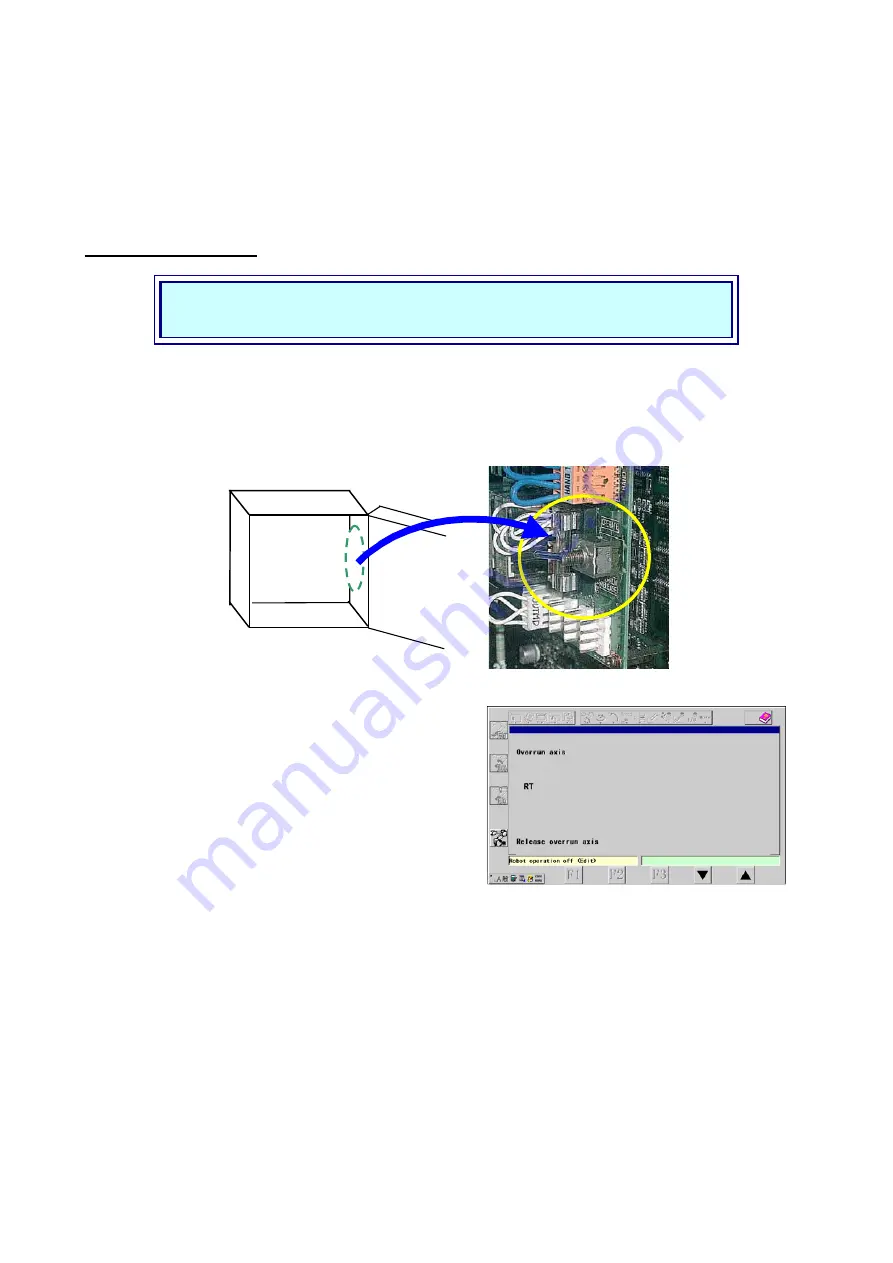
Open the front panel of the controller to access the overrun release switch located on the safety card (ZUEP5702) (right
side P.C. Board).
Then switch it to “OVERRUN RELEASE” (down) side.
Close the front panel of the controller, and place the mode
select switch on the teach pendant in “Teach” position,
and then turn ON the power.
Then the overrun release mode screen appears
indicating the overrun axis.
Turn ON the servo power and manually move the overrun
axis back to within its soft limit.
(At that time the robot travel speed is controlled to 0.5%
or below.)
Turn OFF the power to the controller.
Open the front panel of the controller, and then switch the overrun release switch to “OPERATE” (up) side.
Close the front panel of the controller.