
























viii
Acceleration time/deceleration time
For the E point control or C point control, the acceleration time is the time during which the speed
changes from the startup speed of a motor to the target speed. The deceleration time is the time during
which the speed changes from the target speed to the stop. For the P point control, the acceleration time
is the time during which the speed accelerates form the current speed to the next target speed, and the
deceleration time is the time during which the speed decelerates from the current speed to the next
target speed.
CW, CCW
Generally, these indicate the direction in which the motor is rotating, with CW referring to clockwise
rotation and CCW to counterclockwise rotation.
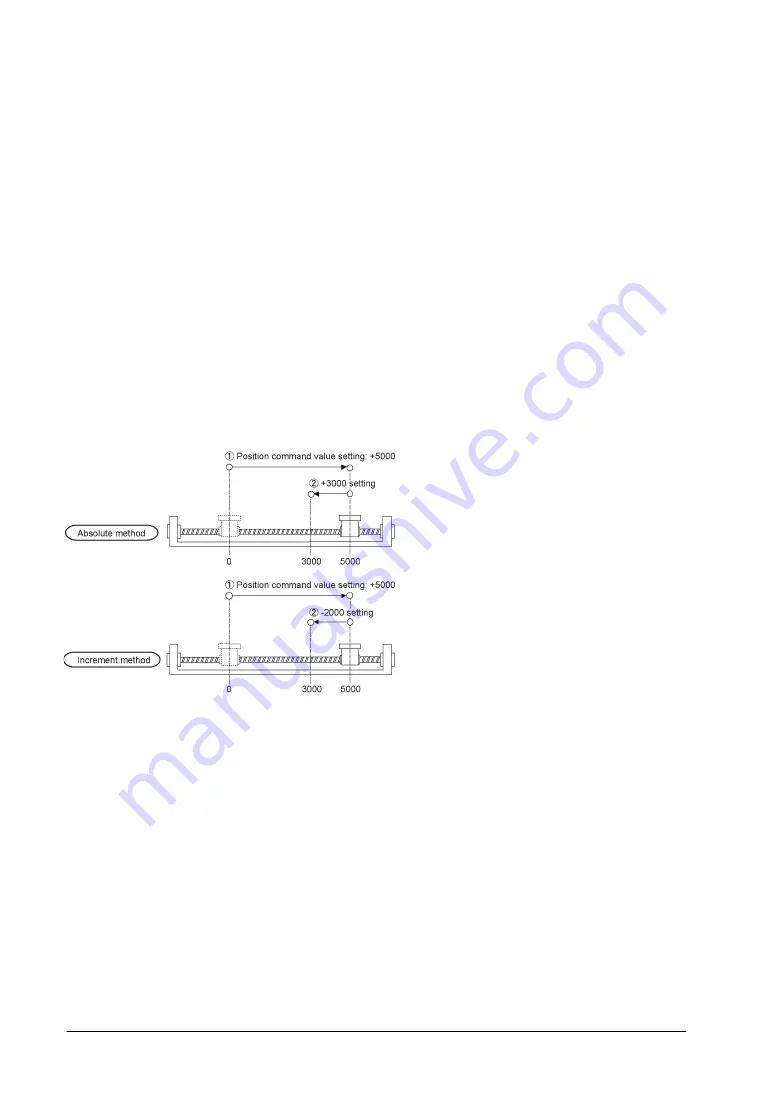
Absolute method (absolute value control method)
This is a control method in which the target position is specified as an absolute position from the home
position. This is specified on the positioning data editing screen of the Configurator PM.
Increment method (relative value control method)
This is a control method in which the distance from the current position to the target position is specified
as a relative position. This is specified on the positioning data editing screen of the Configurator PM.
Automatic operation
This is an operation to be automatically executed, and means a position control.
Manual operation
This is an operation to be executed for an initial boot or adjustments. The home return, JOG operation
and pulser operation are manual operations.
Position control
This is a generic term for the E point control, P point control and C point control. For each control, the
control of a single axis and the interpolation control of multiple axes are available. The interpolation
control can be selected from a 2-axis linear interpolation, 2-axis circular interpolation, 3-axis linear
interpolation and 3-axis spiral interpolation.
JOG operation
This refers to an operation in which the motor is rotated only while operation commands are being input.
This is used to forcibly rotate the motor using input from an external switch, for instance when to make
adjustments. Depending on the circumstances, this can also be applied to unlimited feeding in some
cases.
Содержание FP2 Positioning Unit RTEX
Страница 1: ......
Страница 6: ...iv ...
Страница 14: ...xii ...
Страница 15: ...Chapter 1 Functions of Unit and Restrictions on Combination ...
Страница 21: ...Chapter 2 Parts and Functions ...
Страница 22: ...2 2 2 1 Parts and Functions FPΣ Positioning Unit RTEX FP2 Positioning Unit RTEX ...
Страница 24: ...2 4 ...
Страница 25: ...Chapter 3 Wiring ...
Страница 27: ...3 3 3 2 Network Connector RJ45 plug is connected to the network connector Pins of RJ45 plug Connecting diagram ...
Страница 31: ...Chapter 4 Power On Off and Items to Check ...
Страница 36: ...4 6 ...
Страница 37: ...Chapter 5 4BPreparation For Operation ...
Страница 45: ...Chapter 6 5BI O Allocation ...
Страница 53: ...Chapter 7 6BSetting Tool Configurator PM ...
Страница 83: ...7 31 Setting Font Select Option Font in the menu bar The following dialog is shown ...
Страница 102: ...7 50 ...
Страница 103: ...Chapter 8 7BAutomatic Operation Position Control ...
Страница 118: ...8 16 ...
Страница 119: ...8 17 When the X axis and Y axis is the moving axes each axis in the above diagram is replaced ...
Страница 141: ...Chapter 9 8BManual Operation JOG Operation ...
Страница 146: ...9 6 ...
Страница 147: ...Chapter 10 9BManual Operation Home Return ...
Страница 155: ...Chapter 11 10BManual Operation Pulser Operation ...
Страница 159: ...Chapter 12 11BStop Functions ...
Страница 162: ...12 4 ...
Страница 163: ...Chapter 13 12BSupplementary Functions ...
Страница 177: ...13 15 Sample program When reading AMP parameter No 1 1 of axis 1 with A6N or A5N ...
Страница 179: ...13 17 Sample program When writing AMP parameter No 1 1 of axis 1 with A6N or A5N ...
Страница 183: ...Chapter 14 Precautions During Programming ...
Страница 187: ...Chapter 15 Errors and Warnings ...
Страница 212: ...15 26 ...
Страница 213: ...Chapter 16 Troubleshooting ...
Страница 214: ...16 2 16 1 Cannot Communication With AMP ...
Страница 215: ...Chapter 17 Specifications ...
Страница 275: ...Chapter 18 Dimensions ...
Страница 276: ...18 2 18 1 FPSigma Positioning Unit RTEX ...
Страница 277: ...18 3 18 2 FP2 Positioning Unit RTEX ...
Страница 278: ...18 4 ...
Страница 279: ...Chapter 19 Sample Programs ...
Страница 283: ...19 5 ...
Страница 286: ...19 8 ...
Страница 288: ......







































































