





























an embedded computer with a CAN interface and sophisticated software. The node may also be a gateway allowing a standard
computer to communicate over a USB or Ethernet port to the devices on a CAN network. All nodes are connected to each other
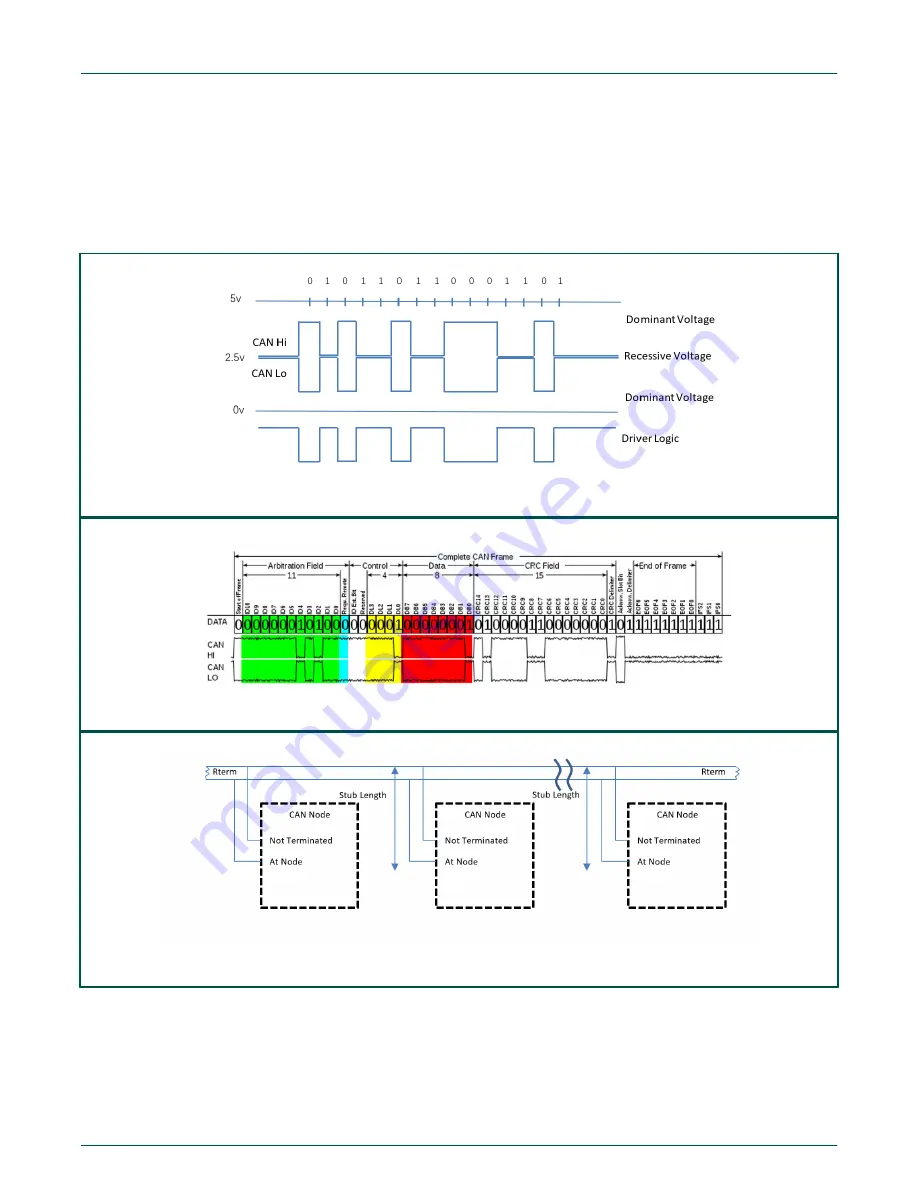
through a two wire bus. The wires are a twisted pair with a 120 Ω (nominal) characteristic impedance.
High speed CAN signaling drives the CAN high wire towards 5 V and the CAN low wire towards 0 V when transmitting a dominant
(0), and does not drive either wire when transmitting a recessive (1). The dominant differential voltage is a nominal 2 V. The
termination resistor passively returns the two wires to a nominal differential voltage of 0 V. The dominant common mode voltage
must be within 1.5 to 3.5 V of common and the recessive common mode voltage must be /-12 of common.
Figure 49. High speed CAN signaling
Figure 50. Base frame format
Figure 51. High speed CAN network
13.1.2 CANopen
CANopen is a CAN-based communication system. It comprises higher-layer protocols and profile specifications. CANopen has
been developed as a standardized embedded network with highly flexible configuration capabilities. Today it is used in various
application fields, such as medical equipment, off-road vehicles, maritime electronics, railway applications, or building automation.
NXP Semiconductors
FlexCAN
Open Industrial User Guide, Rev. 1.8, 05/2020
User's Guide
165 / 199