





























236
Special operation and frequency control
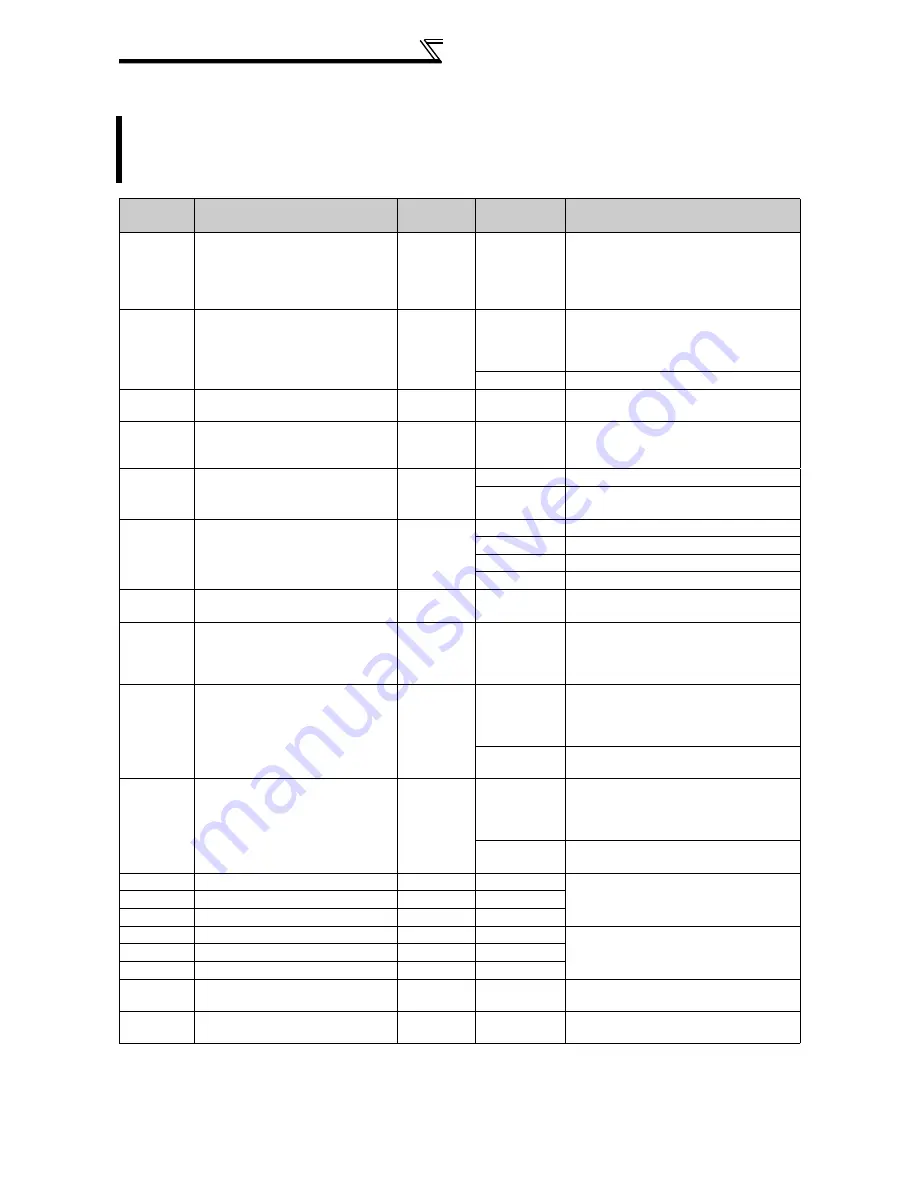
4.20.3 Advanced PID function (pump function) (Pr. 554, Pr. 575 to Pr. 591)
PID control function can adjust the volume of water, etc. by controlling a pump. Multiple motors (4 motors
maximum) can be controlled by switching between the inverter-driven operation and commercial power-
driven operation. Use
Pr. 579 Motor connection function selection
to select switchover operation of the motor. Up
to three auxiliary motors can be connected.
Parameter
Number
Name
Initial
Value
Setting
Range
Description
554
PID signal operation selection
0
0 to 3,
10 to 13
Select the operation to be performed at
the detection of upper, lower, and
deviation limit for the measured value
input. The operation for PID output
suspension function can be selected.
575
Output interruption detection
time
1s
0 to 3600s
The inverter stops operation if the output
frequency after PID operation remains at
less than the
Pr. 576
setting for longer than
the time set in
Pr. 575
.
9999
Without output interruption function
576
Output interruption detection
level
0Hz
0 to 400Hz
Set the frequency at which the output
interruption processing is performed.
577
Output interruption cancel level
1000%
900 to 1100%
Set the level (
Pr. 577
minus 1000%) to
release the PID output interruption
function.
578
Auxiliary motor operation selection
0
0
No auxiliary motor operation
1 to 3
Set the number of auxiliary motors to be
run
579
Motor connection function
selection
0
0
Basic system
1
Alternative system
2
Direct system
3
Alternative-direct system
580
MC switching interlock time
1s
0 to 100s
You can set the time until MC switchover
interlock time when
Pr. 579
= "2, 3" is set.
581
Start waiting time
1s
0 to 100s
You can set the time from when the MC is
switched until it starts when
Pr. 579
= "2,
3". Set this time a little longer than the MC
switching time.
582
Auxiliary motor connection-time
deceleration time
1s
0 to 3600/360s
*1
You can set the deceleration time for
decreasing the output frequency of the
inverter if a motor connection occurs
under advanced PID control.
9999
The output frequency is not forcibly
changed.
583
Auxiliary motor disconnection-
time acceleration time
1s
0 to 3600/360s
*1
You can set the acceleration time for
increasing the output frequency of the
inverter if a motor disconnection occurs
under advanced PID control.
9999
The output frequency is not forcibly
changed.
584
Auxiliary motor 1 starting frequency
60Hz
0 to 400Hz
Set the frequency to connect an auxiliary
motor.
585
Auxiliary motor 2 starting frequency
60Hz
0 to 400Hz
586
Auxiliary motor 3 starting frequency
60Hz
0 to 400Hz
587
Auxiliary motor 1 stopping frequency
0Hz
0 to 400Hz
Set the frequency to open an auxiliary
motor.
588
Auxiliary motor 2 stopping frequency
0Hz
0 to 400Hz
589
Auxiliary motor 3 stopping frequency
0Hz
0 to 400Hz
590
Auxiliary motor start detection time
5s
0 to 3600s
You can set the delay time until the
auxiliary motor is started.
591
Auxiliary motor stop detection time
5s
0 to 3600s
You can set the delay time until the
auxiliary motor is stopped.
The above parameters can be set when
Pr. 160 User group read selection
= "0".
(Refer to page 173)
*1
Depends on the
Pr. 21 Acceleration/deceleration time increments
setting. The initial value for the setting range is "0 to 3600s" and the setting
increments is "0.1s".
Содержание F700
Страница 327: ...318 MEMO ...
Страница 340: ...331 MEMO ...







































































