





























19
3.3.
Mobile beacon a.k.a.
“hedgehog”
-
The mobile and stationary beacons can be easily
interchanged by selecting in the Dashboard
-
The mobile beacons designed to be placed on a robotic
vehicle, copter/drone, AGV, or helmet to trace its
location. Formally speaking, location of the mobile
beacon is traced
—not the robot itself. Since the sizes
and the location of the central point of the mobile
beacon and the robot are different, the difference taken
into accou
nt in the robot’s software (SW)
-
It is recommended to place the mobile beacon
horizontally to provide optimal ultrasonic coverage in
the upper hemisphere
-
Its sensors must not be covered with anything that can
reduce the strength of ultrasonic signal. For example, the system won’t normally work, if one
puts the mobile beacon in a plastic box
-
The beacon’s coordinates are updated according to the rate set on the Dashboard
-
The system may contain one or several mobile beacons. Current implementation relies on a
time-division multiple access approach. Thus, if two mobile beacons are activated, they
share the same system bandwidth. It means that, if the 16 Hz update rate is selected in the
Dashboard
and there are 2 mobile beacons in the system, each beacon’s location will be
updated with the rate of 16Hz/2 ~ 8Hz. If there are 3 mobile beacons => 16Hz/3 ~ 5Hz, etc.
For 4 and more mobile beacons we recommend using Inverse Architecture. See more in
-
Location data is obtained either from the “hedgehog” via USB (virtual UART), UART, SPI, or
from the modem/router via USB (virtual UART). More information on interfaces can be
found
(Mini-RX and Mini-TX beacons do not have pinouts, only over micro-USB)
-
Data from the beacon sent in a streaming format identical to that of GPS (NMEA 0183)
-
There are 433MHz and 868/915MHz (868/915MHz only for Mini-RX and Super-Beacon)
versions available. Proprietary radio protocol is used for communication and
synchronization
-
The “hedgehog” has been successfully integrated with Windows PC, Linux machines,
Raspberry Pi, Arduino boards, Intel boards, etc.
Fig.1: Super-beacon as an example
Содержание Mini-RX
Страница 1: ...Marvelmind Indoor Navigation System Operating manual v2020_12_14 www marvelmind com ...
Страница 16: ...16 HW v4 9 beacon with Mini TX size comparison Beacon Industrial RX Beacon Industrial Super ...
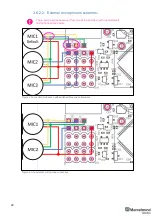
Страница 30: ...30 Figure 6 Two external microphone connection ...
Страница 34: ...34 Figure 9 One external microphone soldering Figure 10 Two external microphones soldering ...
Страница 36: ...36 Figure 13 Two external microphones final view Figure 14 Two external microphones final view ...
Страница 60: ...60 Help video https www youtube com watch v NHUnCtJIYXc ...
Страница 69: ...69 The system is now fully operational ...
Страница 97: ...97 The system is now fully operational ...
Страница 106: ...106 The system is now fully operational ...
Страница 115: ...115 The system is now fully operational ...
Страница 136: ...136 Advanced settings TBD Enabling will allow direction along with location TBD TBD TBD ...
Страница 171: ...171 Floor 5 is enabled Floor 4 is enabled ...
Страница 175: ...175 Z X ...
Страница 190: ...190 Choose color and press OK Color applied Now background matches floorplan ...
Страница 192: ...192 Choose any color which suits you and press OK Now the hedgehog and its tracking path will be colored ...
Страница 196: ...196 7 18 IMU axis positioning Super Beacon IMU axis positions HW v4 9 IMU axis positions ...
Страница 197: ...197 Mini TX IMU axis positions Mini RX beacon IMU axis positions ...
Страница 201: ...201 Real time player turned on ...
Страница 204: ...204 8 1 Super beacon external interface pinout top view ...
Страница 205: ...205 8 2 Beacon HW v4 9 external interface 4x4 pinout top view ...
Страница 206: ...206 8 3 Modem HW v4 9 external interface pinout top view ...
Страница 225: ...225 How to change modes Choose hedge Go to Ultrasound TDMA mode Left mouse button click to change ...
Страница 240: ...240 Right mouse button on it Set movement path Shift Left mouse click to add point ...
Страница 241: ...241 Shift Left mouse click on point to remove that point Click on Upload path to send it to robot Path loaded ...
Страница 250: ...250 Contacts For additional support please send your questions to info marvelmind com ...







































































