

























File Version: 3.2
28
/
62
JAKA C Series Hardware User Manual
3. Install the required end-effector at the tool flange of the robot.
4.2.2
Important Security Instructions
Warning:
1. Ensure that the robot is installed correctly and safely.
2. The installation surface must be shock-proof with enough loading
capacity.
Warning:
1. Ensure that the end-effector is installed correctly and safely.
2. Ensure that the tools are safe and that no parts may drop
unexpectedly to cause any danger.
Warning:
1. Ensure that the control cabinet and cables do not come into
contact with any liquid. A wet control cabinet can lead to electric
shock hazards and even death.
2. The control cabinet must not be exposed in an environment with
dust or humidity level exceeds IP44. Pay close attention to the
environment of conductive dust.
Warning:
If the robot is soaked in water for a certain period of time, it may be damaged. Robots should not be installed
in water or a humid environment.
4.2.3
Installation of the Robot
JAKA robot can be installed at any position at 360° and supports mounting in any direction including ceiling,
table, and wall mounting. Several typical installation methods are shown below:
1. Table mounting
2. Ceiling mounting
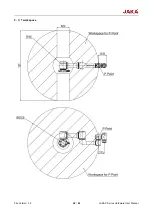
3-4. Wall mounting
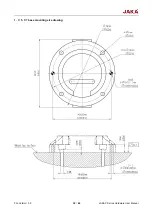
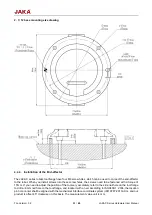
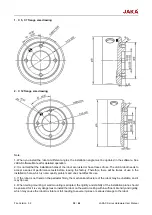
Base mounting: Use four screws (see the table below for screw types and tightening torque) to install the robot
through four holes (see table below) on the robot base. If you need to accurately adjust the position of the robot,
you can reserve 2 nail holes (see table below) on the installation plane and locate it with nails. You may also
buy a standard machine base as an accessory. Install the robot on a steady, shock-proof surface, which should
be sufficient to bear at least 10 times the maximum torque (see table below) of the base joint and at least 5
times the weight of the robot. The recommended thickness of the robot’s installation plane shall be no less than
20mm, and the surface shall be made of steel. In addition, try to avoid directly installing the robot on an empty
box, which can easily cause resonance and make abnormal noise. If the robot is installed on a linear or moving
platform, the acceleration of the installation base should be very low, because high acceleration will cause the
robot to give a false alarm of collision and stop running.

































































