


























File Version: 3.2
22
/
62
JAKA C Series Hardware User Manual
Chapter 4 Mechanical Specification
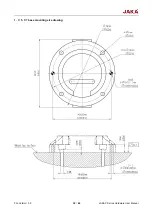
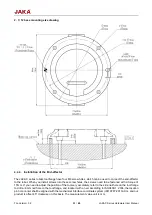
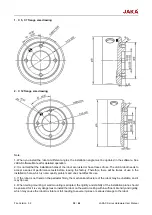
The robot is mainly composed of six joints and two aluminum arms. The base is used to connect the robot to
the pedestal, and the tool end is used to connect the robot to the end-effector. The end-effector can move and
rotate in the workspace of the robot. This chapter will introduce the basic precautions during the installation of
each component of the robot system.
4.1
Robot Workspace
4.1.1
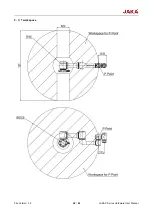
Size of the Robot
During the installation, you must consider the movement range of the robot to avoid harming the surrounding
personnel and equipment.
C 5
C 7
C 12
4.1.2
Size of the Control Cabinet







































































