


























File Version: 3.2
40
/
62
JAKA C Series Hardware User Manual
In most applications, to facilitate the security operation, one or more additional emergency stop or protective
stop switch is needed. Figure 5-5 shows the working principles of one or more emergency stop switch. The V+
and V- can also be connected to the external 24V power supply.
Figure 5-5 Emergency stop switch wiring
3. Protective stop switch
The protective stop function supports automatic recovery (See JAKA Software Manual for details). The door
switch is an application case of the protective stop device. When the door is open, the robot stops. The wiring
is shown in Figure 5-6:
Figure 5-6 Protective stop switch wiring
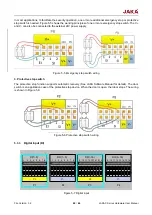
5.3.3
Digital Input (DI)
Figure 5-7 Digital input
Protective stop Signal switch
Protective stop Multiplexer switch
1
2 3 4 5 6 7 8
DI(1~8)
V+
1
2 3 4 5 6 7 8
DO(1~8)
V-
9 10 11 12 13 14 15 16
DI(9~16)
V+
9 10 11 12 13 14 15 16
DO(9~16)
V-
P1
P2
P3
P4







































































