




























File Version: 3.2
15
/
62
JAKA C Series Hardware User Manual
Brake state
Braking status
2.
Protective stop:
The protective stop is a stop type triggered when the robot controller detects an error.
Users can trigger the configuration via the SI interface on the control cabinet panel P8, and the safety IO and
safety plane function in the safety settings.
When the robot is in the protective stop state, its states are as follows:
Protective stop
Robot movement state
Stop
Joint motor state
Enabled
Robot power
On
Program execution
Paused
Brake state
Release status
2.4
Three-Position Enable Device (Optional)
JAKA robot support a three-position enable function, which can be used in conjunction with external three-
position enable device. The standard product delivery of JAKA robot does not include this device. The three-
position enabling safety input interface is available for users and the design meets the certification requirements.
For this optional device, please contact the authorized integrator of JAKA.
When you use three-position enable device and configure the corresponding function in the software, the robot
can only be moved and controlled after the three-position switch is pressed.
The corresponding robot control states for different states of the three-position switch are as follows:
Switch state
Robot state
Manual control
(JOG, debugging)
Automatic
control
(program operation)
1
Unpressed
Protective stop (Cat. 2)
Prohibited
When an operation program
is started, the three-position
enabling
function
is
switched off.
2
Pressed lightly
Normal
Started
3
Pressed heavily
Protective stop (Cat. 2)
Prohibited
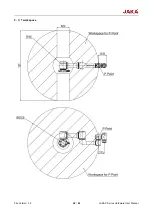
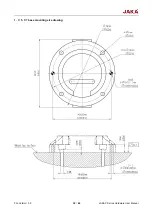
The schematic diagram of the three-position enabling switch is as follows:
Figure 2-1 Schematic diagram of the three-position enabling switch







































































