





















N700E INSTRUCTION MANUAL
10-3
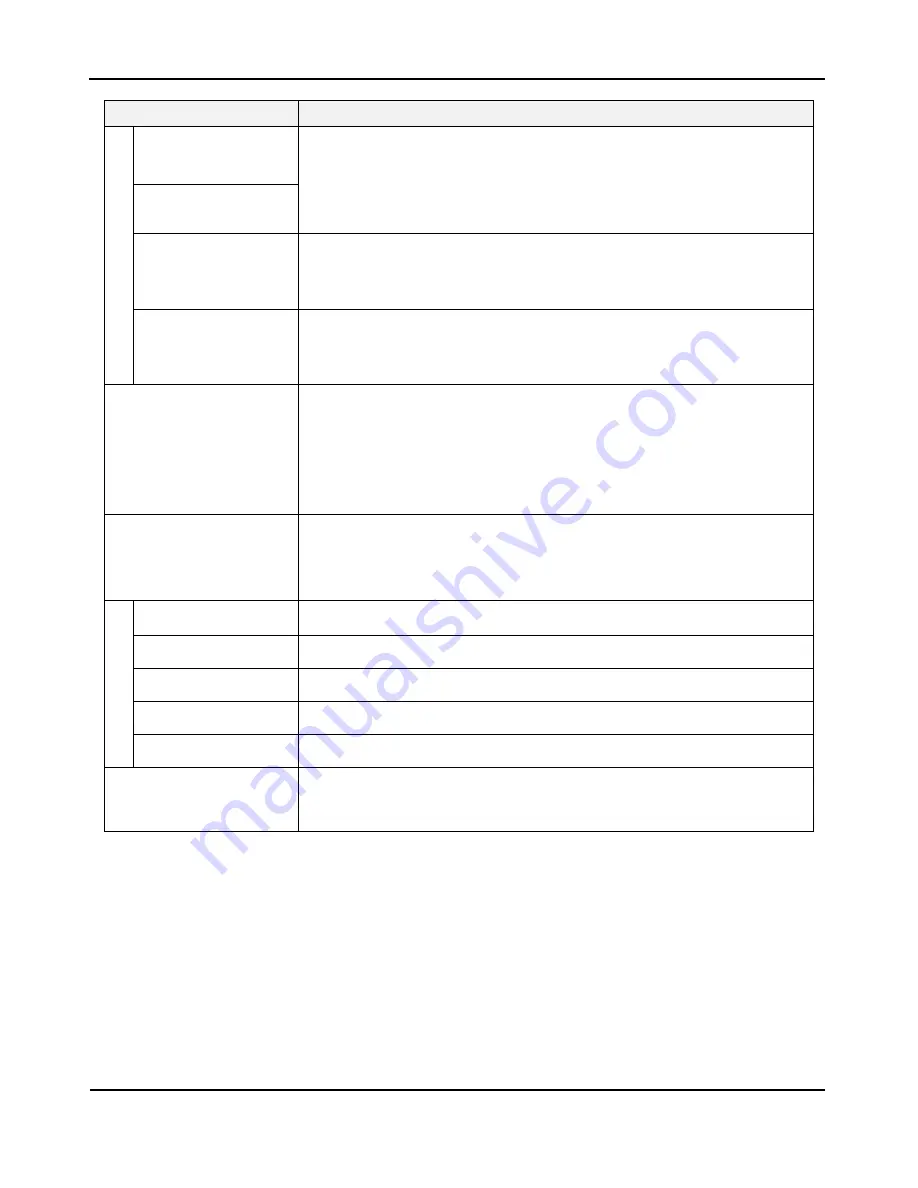
Inverter model
Common specifications for all model
O
u
tp
u
t
S
ig
n
a
l
Intelligent output
terminal
(RN0-RN1,RN2-RN3)
RUN(run status signal), FA1 (frequency arrival signal),
FA2 (setting Frequency arrival signal),OL(overload advance notice signal),
OD(PID error deviation signal), AL(alarm signal)
Alarm output terminal
FM output
Analog meter (DC0~10V fullscale. Max ∙ 1mA)
Output frequency, output current, output voltage and output power
AMI output
Analog meter (4~20mA full scale. Max ∙ 250
Ω
)
Output frequency, output current, output voltage and output power
Other functions
AVR function, curved accel/decel. profile, upper and lower limiters,
16-stage speed profile, fine adjustment of start frequency, BRD function
carrier frequency change(0.5 to 16Khz), frequency jump, gain and bias setting,
process jogging, electronic thermal level adjustment, retry function,
trip history monitor, auto tuning(1), V/f characteristic selection, Speed Search
automatic torque boost, frequency conversion display, USP function
Protection function
Over current, Over load(Electronic thermal), Inverter Over voltage, IOLT
Communication error, Under voltage, Output short circuit detection, USP error,
EEPROM error, External error, Ground fault, Over heat, Input phase loss,
Braking resistor overload
S
ta
n
d
a
rd
s
p
e
c
if
ic
a
ti
o
n
Ambient
temperature
-10~40
℃
(If ambient temperature is above 40
℃,
Carrier frequency should be
lower than default value.)
Storage
temperature
-20~60
℃
Ambient humidity
Below 90%RH (Installed with no dew condensation)
Vibration
5.9m/s
2
(0.6G). 10~55Hz
Location
Under 1000m above sea level, indoors
(Installed away from corrosive gasses dust)
Option
Noise filter , DC reactor, AC reactor
Remote operator, cable for remote operator,
Braking resistor
(Note6)
Footnotes for the preceding table
Note 3 Control method setting A31 to 2 (sensorless vector control) Selected, set carrier frequency(b11) more
than 2.1kHz.
Using motor less than half of the rated capacity, you cannot get enough performance.
Multiple motors cannot be driven by sensorless vector control.
Note 4 To operate the motor over 50/60Hz, consult the motor manufacturer about the maximum
allowablerotation speed. In case of sensorless control mode, it can be 300Hz
Note 5 Inverter frequency could be exceeded 1.5Hz for the maximum frequency[A04] in the case of motor
stabilization is required.
Note 6. The braking torque via capacitive feedback is the average deceleration torque at the shortest
deceleration (stopping from 50/60Hz as indicated). It is not continuous regenerative braking torque.
And, the average deceleration torque varies with motor loss.This value decreases when operating
beyond 50 Hz. If a large regenerative torque is required, the optional regenerative braking resistor
should be used.







































































