





























4-23
Chapter 4
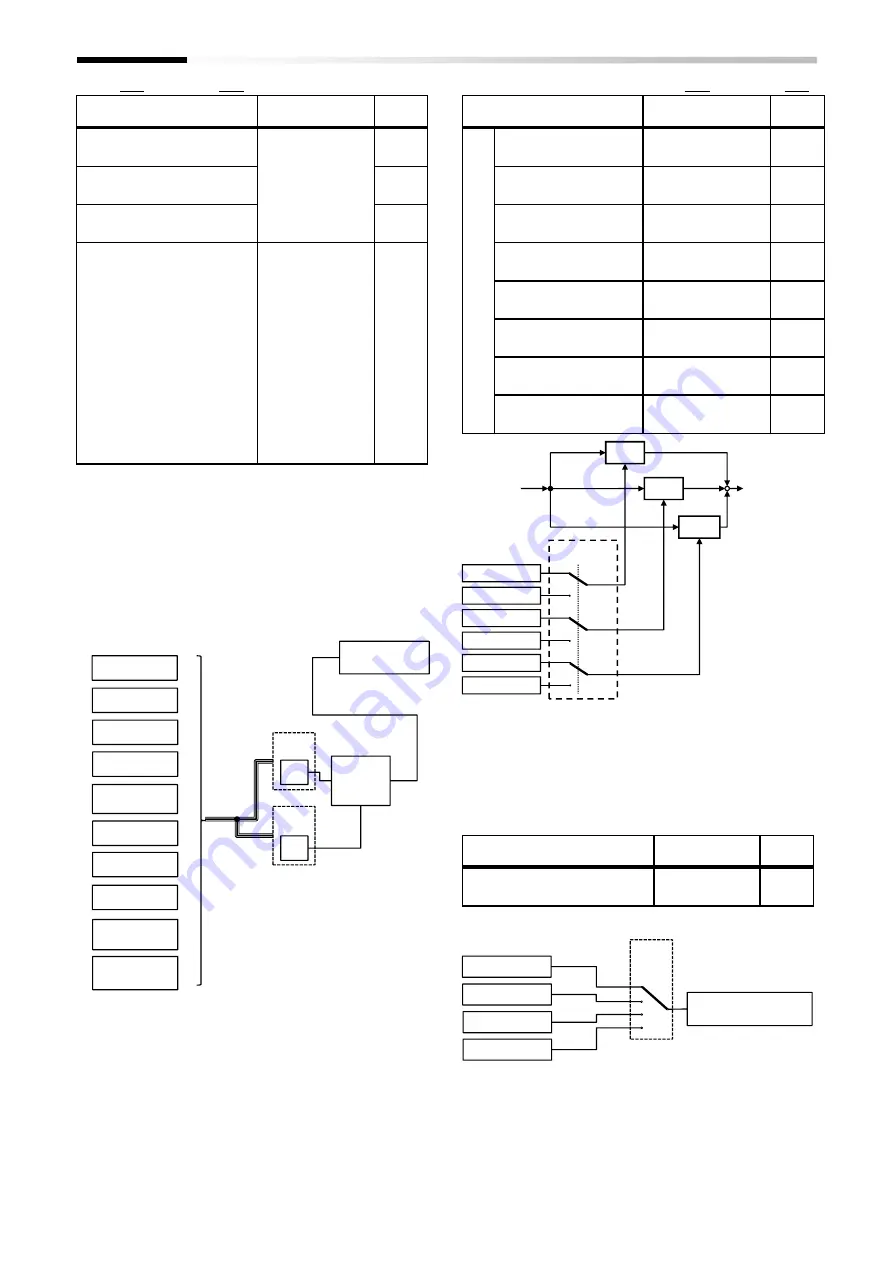
For parameter configuration
[AH-51]
~
[AH-54]
Code/Name
Range (unit)
Initial
value
AH-51
Input source selection
of process data 1 for PID1
00
~
06/08
~
13 *1)
01
AH-52
Input source selection
of process data 2 for PID1
00
AH-53
Input source selection
of process data 3 for PID1
00
AH-54
Calculation symbol
selection of Process data for PID1
01(Addition)/
02(Subtraction)/
03(Multiplication)/
04(Division)
05(Square Root FB1)
06(Square Root FB2)
07(Square Root
FB1-FB2)
08(Average of
three inputs)
09(Minimum of
three inputs)
10(Maximum of
three inputs)
01
*1)00(Not used)/01(Ai1 terminal)/02(Ai2 terminal)/03(Ai3 terminal)/
04(Ai4 input)/05(Ai5 input)/06(Ai6 input)
08(RS485)/ 09(Option 1)/10(Option 2)
11(Option 3)/12(Pulse train input:main)/13(Pulse train input:option)
・
For PID1 feedback, two targets are selected, feedback
data 1 and feedback data 2, the result of the operation
carried out between these two constitutes the PID1
feedback value.
[AH-60]
~
[AH-70]
Code/Name
Range (unit)
Initial
value
PI
D
1
AH-60
PID1 gain
change method selection
00(Constant gain [1])/
01([PRO] terminal)
00
AH-61
PID1
proportional gain 1
0.0
~
100.0
1.0
AH-62
PID1 integral
time constant 1
0.0
~
3600.0(s)
1.0
AH-63
PID1 derivative
gain 1
0.0
~
100.0(s)
0.0
AH-64
PID1
proportional gain 2
0.0
~
100.0
0.0
AH-65
PID1 integral
time constant 2
0.0
~
3600.0(s)
0.0
AH-66
PID1 derivative
gain 2
0.0
~
100.0(s)
0.0
AH-67
PID1 gain
change time
0
~
10000(ms)
100
・
If [PIDC] terminal is active (ON), the value of the integral
constant is purged. If done while operating, the
operation can become instable/insecure.
・
With [PRO] terminal, the gain can be changed. If the
state is OFF, Gain 1 is used, if the state is ON, Gain 2 is
used.
Code/Name
Range (unit)
Initial
value
AH-70
PID1 feedforward selection
00
~
03 *2)
00
*2) 00(Not used)/01(Ai1 terminal)/02(Ai2 terminal)/03(Ai3 terminal)
・
To perform the PID feedforward control, an input is
selected.
PID feedback
value
RS485
communication
Option
1
Option
2
Option
3
[AH-51]
Analog input 1
Analog input 2
Analog input 3
Not used
[AH-54]
+, -, x, ÷
[AH-52]
01
02
03
08
09
10
11
00
Pulse train
input (internal)
12
01
00
Pulse train
input (option)
13
PID operation
result
Terminal [PRO]
PID
deviation
+
P
I
D
+
+
P 1 [AH-61]
P 2 [AH-64]
I 1 [AH-62]
I 2 [AH-65]
D 1 [AH-63]
D 2 [AH-66]
OFF
OFF
OFF
ON
ON
ON
PID feedforward value
[AH-70]
01
02
03
Analog input 1
Analog input 2
Analog input 3
Not used
01
02
03
00
00
Содержание P1-00041HFEF
Страница 6: ...0 5 Contents Contents Memo ...
Страница 42: ...2 26 Chapter 2 Installation and Wiring Memo ...
Страница 129: ...Index Index 3 memo ...
Страница 130: ...Index Index 4 memo ...







































































