



















T
ORQUE
R
EFERENCES
C
OVER AND
C
HASSIS
81
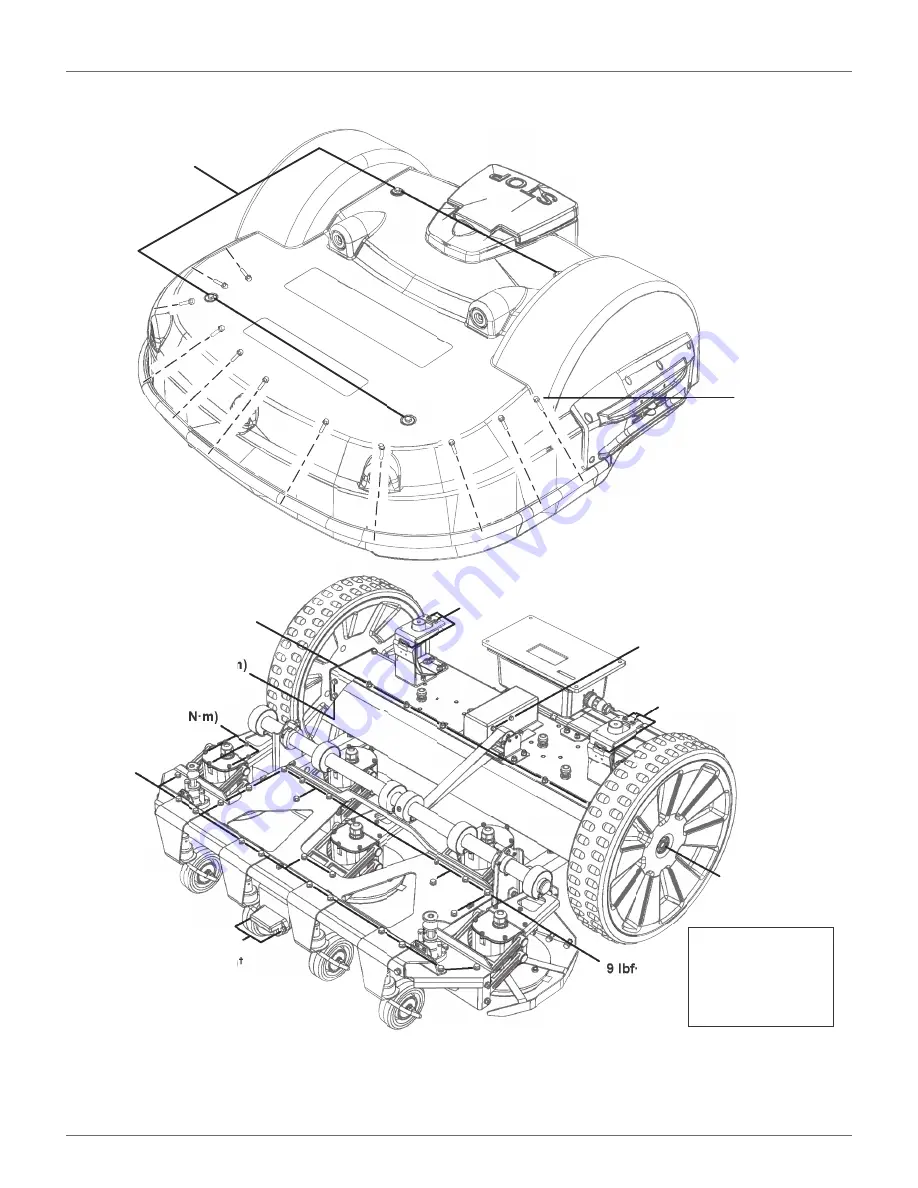
12.11 Cover and Chassis
A - Rear View
B - Bottom View
9 lbf
Â
ft
(12 N
ÂP
1 lbf
Â
ft
(1.5 N
ÂP
9 lbf
Â
ft
(12 N
ÂP
†
48 lbf
Â
ft
(65 N
ÂP
†
1 lbf
Â
ft
(1.5 N
ÂP
†
4.5 lbf
Â
ft
(6 N
ÂP
†
2.25 lbf
Â
ft
(3 N
ÂP
11 lbf
Â
ft
(15 N
ÂP
9 lbf
Â
ft
(12 N
ÂP
11 lbf
Â
ft
(15 N
ÂP
5 lbf
Â
ft
(7 N
ÂP
1 lbf
Â
ft
(1.5 N
ÂP
†
†
Loctite 243
Blue Threadlocker
††
Loctite 2701
Green Threadlocker
DRAFT
05-23-2019







































































