





























Basics communication
EL5101, EL5101-0010, EL5101-0011
31
Version: 4.2
• A right-shift (positive shift value) will delay the counter value query, which means the position value
becomes more current from the PLC perspective. However, this increases the risk that the position
determination may not be finished in time before the arrival of EtherCAT frame, so that no current
position value is available in this cycle.
• A left-shift (negative shift value) means the counter value will be queried earlier, resulting in older
position values, with an associated increase in the safety buffer before the arrival of the EtherCAT
datagram. This setting may be useful in systems with high real-time jitter, if no Industrial PCs from
Beckhoff are used for control purposes, for example.
Attention
Attention! Risk of device damage!
The mentioned notes and information should be used advisedly. The EtherCAT master au-
tomatically allocates SYNC0 and SYNC1 settings that support reliable and timely process
data acquisition. User intervention at this point may lead to undesired behavior. If these set-
tings are changed in the System Manager, no plausibility checks are carried out on the soft-
ware side. Correct function of the terminal with all conceivable setting options cannot be
guaranteed.
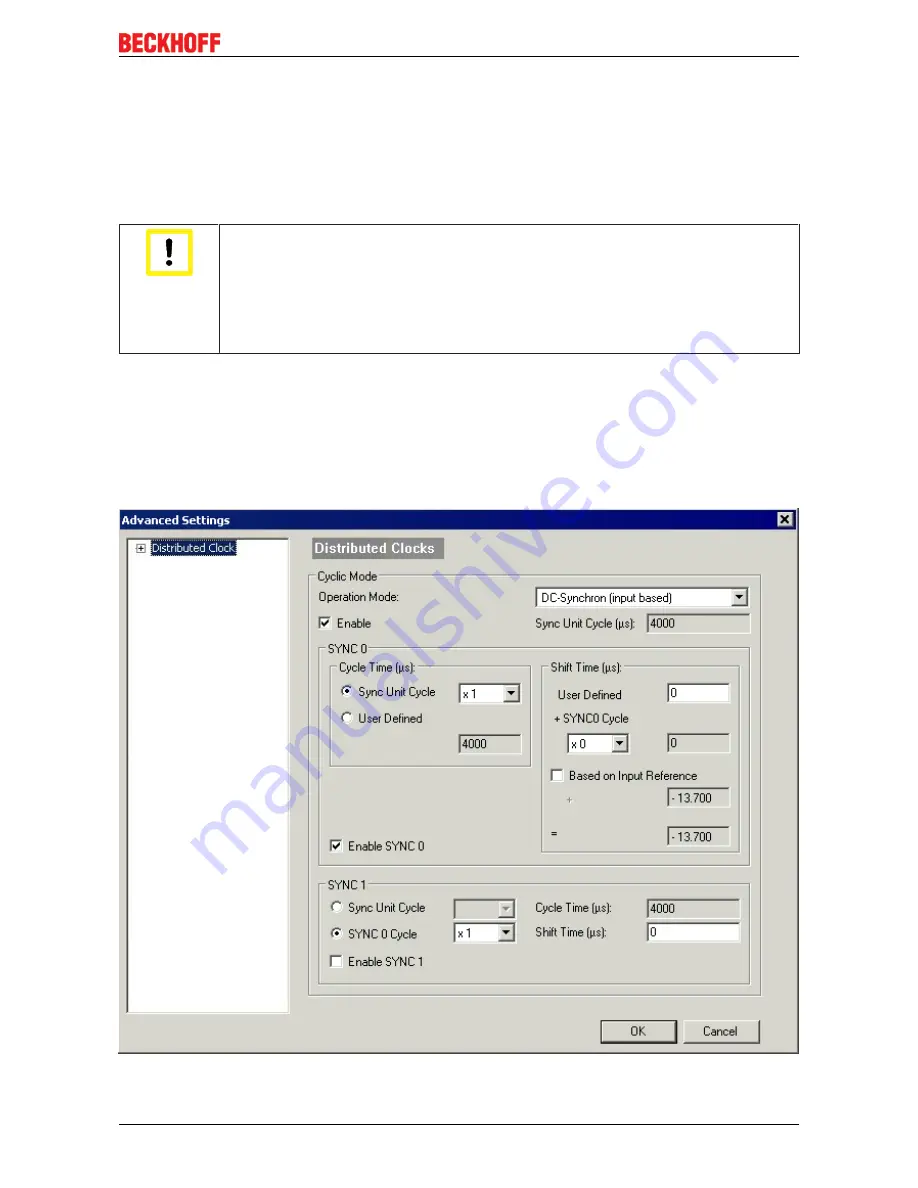
Default setting
The cyclic read of the inputs is triggered by the SYNC0 pulse (interrupt) from the DC in the EL51xx. The
EtherCAT master sets the Sync Unit Cycle time value to the PLC cycle time and therefore the EtherCAT
cycle time as standard. See Fig.
Advanced Distributed Clock (DC) settings, EL51xx terminal:
4000µs = 4 ms,
as TwinCAT is in configuration mode.
EL51xx DC settings
Fig. 20: Advanced Distributed Clock (DC) settings, EL51xx terminal







































































