





























Note
Action
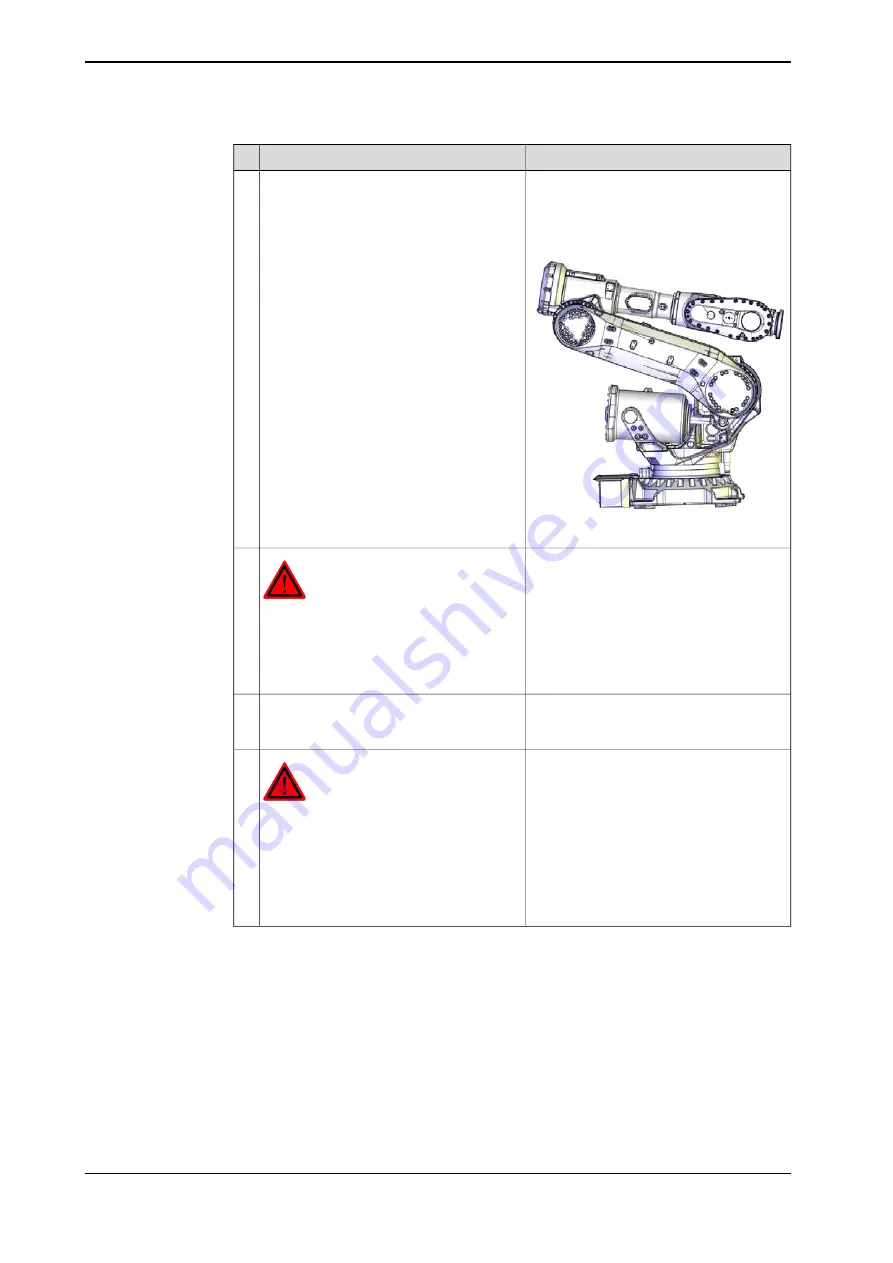
If needed, run the axis-1 into a position that
gives the required space (space to place
two pallets in a row) at the right-hand side
of the balancing device, as seen from be-
hind.
xx1800000029
Jog the robot to:
•
Axis 1 = No significance (as long as
the robot is secured to the founda-
tion).
•
Axis 2 = -65°
•
Axis 3 = m position, upper
arm resting against the mechanical
stop (approxi70°).
•
Axis 4 = 0°
•
Axis 5 = -90°
•
Axis 6 = 0°
2
DANGER
When releasing the holding brakes of the
motor, the upper arm will be movable and
may fall down if not secured. Verify that the
upper arm is secured as previously de-
scribed, before continuing.
3
Release the holding brakes for the axis-3
motor to make the upper arm rest tightly
against the mechanical stop.
4
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the robot
working area.
5
Continues on next page
742
Product manual - IRB 6700
3HAC044266-001 Revision: N
© Copyright 2013 - 2018 ABB. All rights reserved.
4 Repair
4.8.5 Replacing the axis-3 gearbox
Continued
Содержание IRB 6700 - 150/3.20
Страница 1: ...ROBOTICS Product manual IRB 6700 ...
Страница 2: ...Trace back information Workspace R18 2 version a18 Checked in 2018 11 20 Skribenta version 5 3 012 ...
Страница 46: ...This page is intentionally left blank ...
Страница 110: ...This page is intentionally left blank ...
Страница 786: ...This page is intentionally left blank ...
Страница 812: ...This page is intentionally left blank ...
Страница 836: ...This page is intentionally left blank ...
Страница 838: ...This page is intentionally left blank ...
Страница 845: ......


































































