













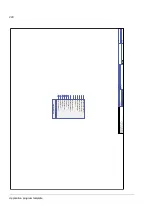
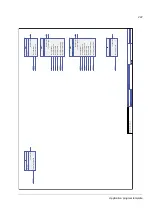
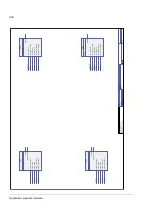

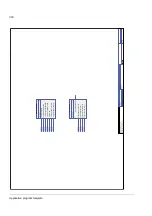
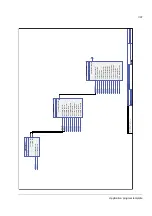
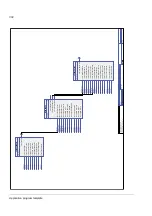
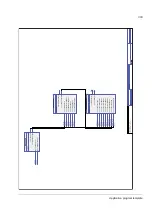
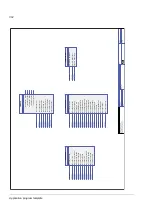





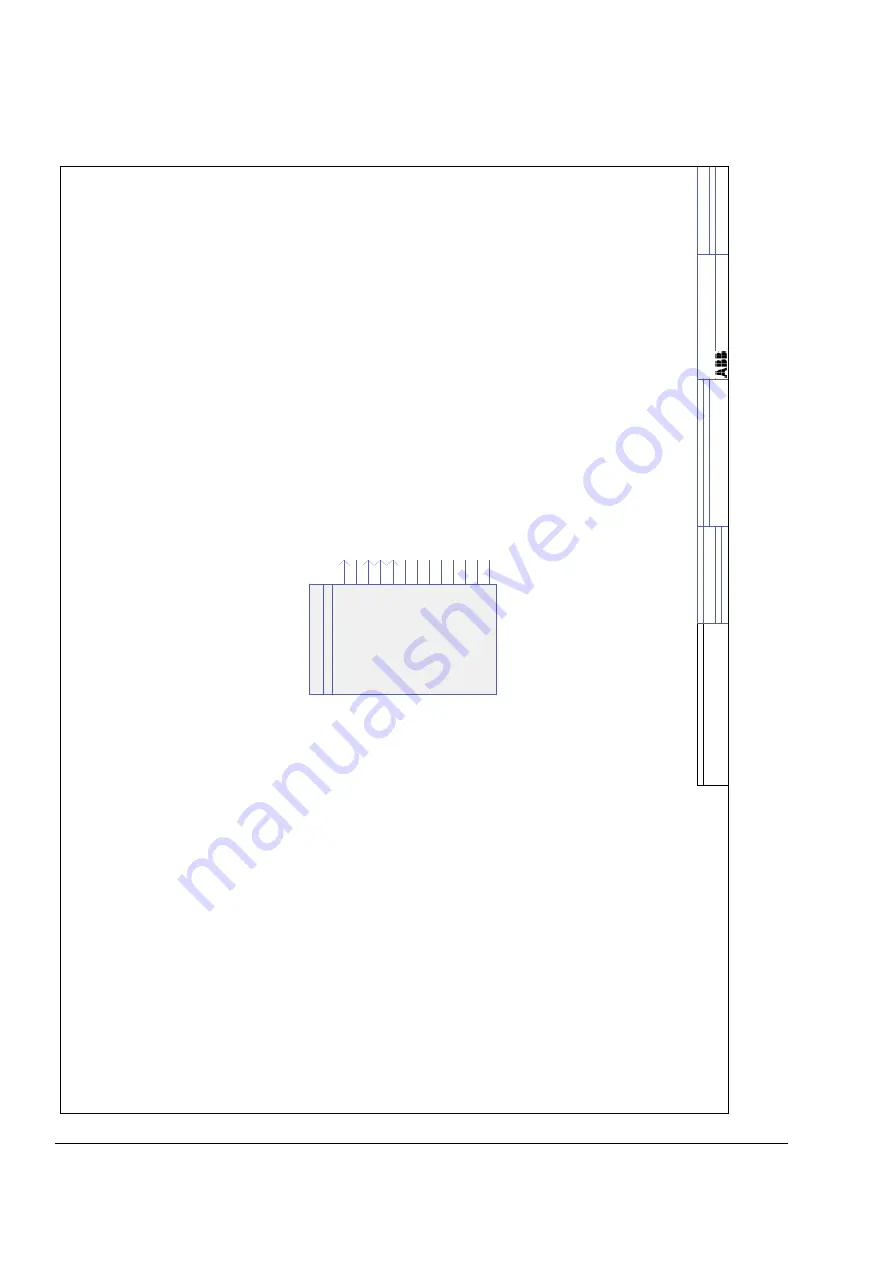
Application program template
296
AC
TU
A
L V
AL
U
ES
14
T
L
F
10
2
m
s
e
c
(1)
1.
02
S
P
E
E
D
A
C
T
P
E
R
C
1.
03
F
R
E
Q
U
E
N
C
Y
1.
04
C
U
R
R
E
N
T
1.
05
C
U
R
R
E
N
T
P
E
R
C
1.
06
T
O
R
Q
U
E
1.
07
DC
-V
O
L
T
A
G
E
1.
14
S
P
E
E
D
E
S
T
IM
A
T
E
D
1.
15
T
E
M
P
I
N
V
E
R
T
E
R
1.
16
T
E
M
P
B
C
1.
20
B
R
A
K
E
R
E
S
L
O
A
D
1.
22
IN
V
E
R
T
E
R
P
O
W
E
R
1.
26
O
N
T
IM
E
C
O
U
N
T
E
R
1.
27
R
U
N
T
IM
E
C
O
U
N
T
E
R
P
a
g
e
1
S
ig
n
a
ls
F
W
A
c
o
m
p
a
tib
il
it
y
le
ve
l
=
1
.4
6
F
ir
m
w
a
re
Li
b
ra
ry
I
D
=
1
, ver
=
1
.0
S
ta
n
d
a
rd
L
ib
ra
ry
I
D
=
1
0
0
0
0
, ve
r =
1
.1
Ba
se
d
o
n
Cu
s
tom
e
r
Cu
s
t.
D
o
c
.
N
o
.
Dat
e
Pr
e
p
a
re
d
Ap
p
ro
v
e
d
Pr
o
je
ct
n
a
m
e
Ti
tl
e
D
o
c
.
d
e
s.
Re
s
p
.
d
e
p
t.
Do
c.
N
o
.
Содержание ACSM1 Series
Страница 1: ...ACSM1 Firmware Manual ACSM1 Speed and Torque Control Program...
Страница 2: ......
Страница 4: ......
Страница 12: ...Table of contents 12...
Страница 49: ...Drive control and features 49...
Страница 282: ...Standard function blocks 282...
Страница 306: ...Application program template 306...
Страница 312: ...Control chain block diagrams 312...
Страница 331: ...331...
Страница 332: ...332...
Страница 333: ......







































































