

























Appendix B – Drive-to-drive link
321
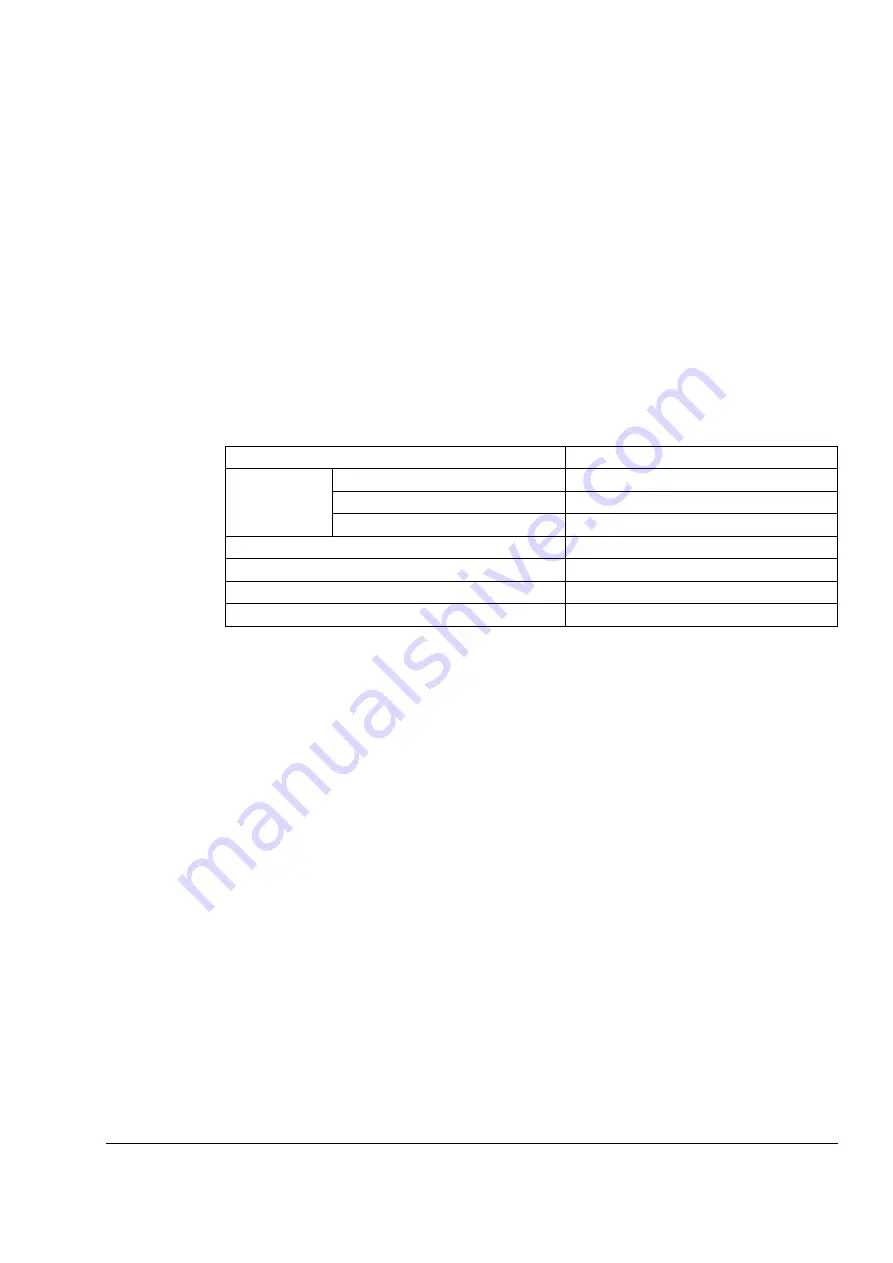
Types of messaging
Each drive on the link has a unique node address allowing point-to-point
communication between two drives. The node address 0 is automatically assigned
to the master drive; on other drives, the node address is defined by parameter
Multicast addressing is supported, allowing the composition of groups of drives. Data
sent to a multicast address is received by all drives that have that address. A
multicast group can consist of 1…62 drives.
In broadcast messaging, data can be sent to all drives (actually, all followers) on the
link.
Both master-to-follower(s) and follower-to-follower(s) communication is supported. A
follower can send one message to another follower (or a group of followers) after
receiving a token message from the master.
Type of messaging
Note
Point-to-point
Master point-to-point
Supported only at master
Read remote
Supported only at master
Follower multicast
Supported only at followers
Standard multicast
For both master and followers
Broadcast
For both master and followers
Token message for follower-to-follower communication
–
Chained multicast (Reference 1 only)
Supported only for drive-to-drive reference 1
Содержание ACSM1 Series
Страница 1: ...ACSM1 Firmware Manual ACSM1 Speed and Torque Control Program...
Страница 2: ......
Страница 4: ......
Страница 12: ...Table of contents 12...
Страница 49: ...Drive control and features 49...
Страница 282: ...Standard function blocks 282...
Страница 306: ...Application program template 306...
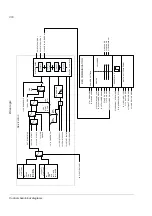
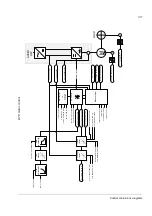
Страница 312: ...Control chain block diagrams 312...
Страница 331: ...331...
Страница 332: ...332...
Страница 333: ......







































































