





























Parameter
Function
Default
Value
When ena-
bled
No.
Dig.
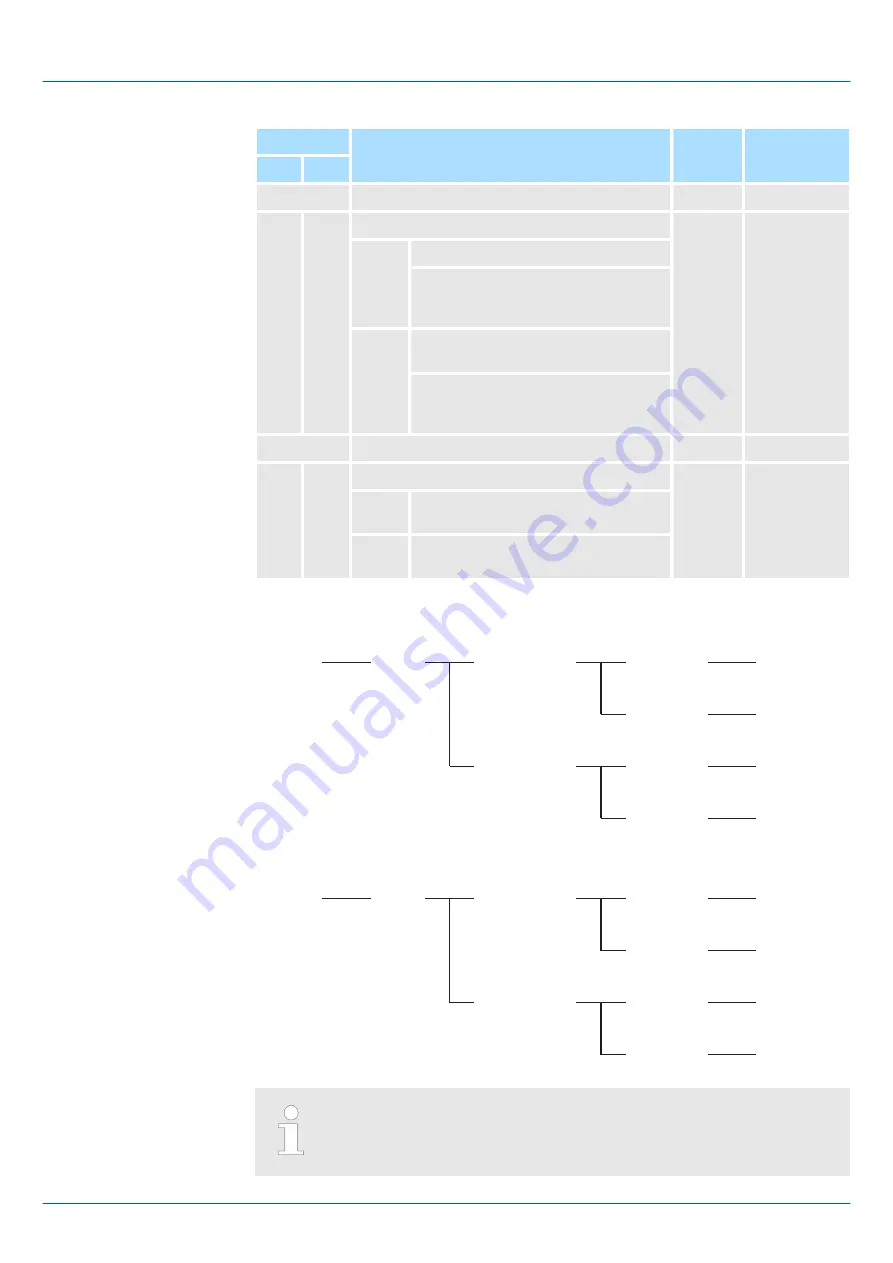
Pn000
Basic Function Selections 0
-
-
0
Rotation / Movement Direction Selection
0
After restart
0
Use CCW as the forward direction.
Use the direction in which the linear
encoder counts up as the forward
direction.
1
Use CW as the forward direction.
(Reverse Rotation Mode)
Use the direction in which the linear
encoder counts down as the forward
direction. (Reverse Movement Mode)
Pn080
Application Function Selections 80
-
-
1
Motor Phase Sequence Selection
0
After restart
0
Set a phase-A lead as a phase
sequence of U, V, and W.
1
Set a phase-B lead as a phase
sequence of U, V, and W.
Parameter Settings
U -> V -> W
(U -> W -> V)
Pn000.0 = 0
Pn080.1 = 0
Pn000.0 = 0
Pn080.1 = 1
Pn000.0 = 1
Pn080.1 = 1
Pn000.0 = 1
Pn080.1 = 0
U -> W -> V
(U -> V -> W)
U -> V -> W
(U -> W -> V)
Un00D increase
(Un00D decrease)
Available
(Pn080.0 = 0)
Forward
(Reverse)
Un00D decrease
(Un00D increase)
U -> W -> V
(U -> V -> W)
Hall Sensor
Command
Desired Direction
Monitor Feedback
Pulse Counter
Monitor Hall
Sensor (Un011)
Parameter Setting
CCW
(CW)
Pn000.0 = 0
Pn080.1 = 0
Pn000.0 = 1
Pn080.1 = 1
Pn000.0 = 0
Pn080.1 = 1
Pn000.0 = 1
Pn080.1 = 0
CW
(CCW)
CCW
(CW)
Un00D increase
(Un00D decrease)
Not available
(Pn080.0 = 1)
Forward
(Reverse)
Un00D decrease
(Un00D increase)
CW
(CCW)
Hall Sensor
Command
Desired Direction
Monitor Feedback
Pulse Counter
Visual Check
Rotation of Shaft
Parameter Setting
Please make sure Pn080.1 is set according the above diagram. Other-
wise motor malfunction may occur.
Sigma-5 and Sigma-7 Series SERVOPACKs
SERVOPACK with Semi-closed Loop Control for Linear Motors
Motor Rotation Direction
| | Feedback Option Module Type 3 - Manual version C - Revision 0 | en |
93







































































