





























*1 these settings are dependent on the applications
1. If there is a fraction, it is necessary to round off the decimal point.
2. If the number of external encoder period per motor rotation is not an
integer, there is some error in the speed loop. However, this is not rele-
vant for the position loop. Therefore it does not interfere with the position
accuracy.
11.1.3
Encoder Pulse Output (PAO, PBO, and PCO)
Set the position resolution to Pn281. Set the number of phase A and phase B edges.
Specifications
n
External encoder pitch: 20
µ
m
n
Ball screw lead: 30 mm
n
Speed: 1600 mm/s
If the output of a single pulse (multiplied by 4) is 1
µ
m, the set value will be 20.
If the output of a single pulse (multiplied by 4) is 0.5
µ
m, the set value will be 40.
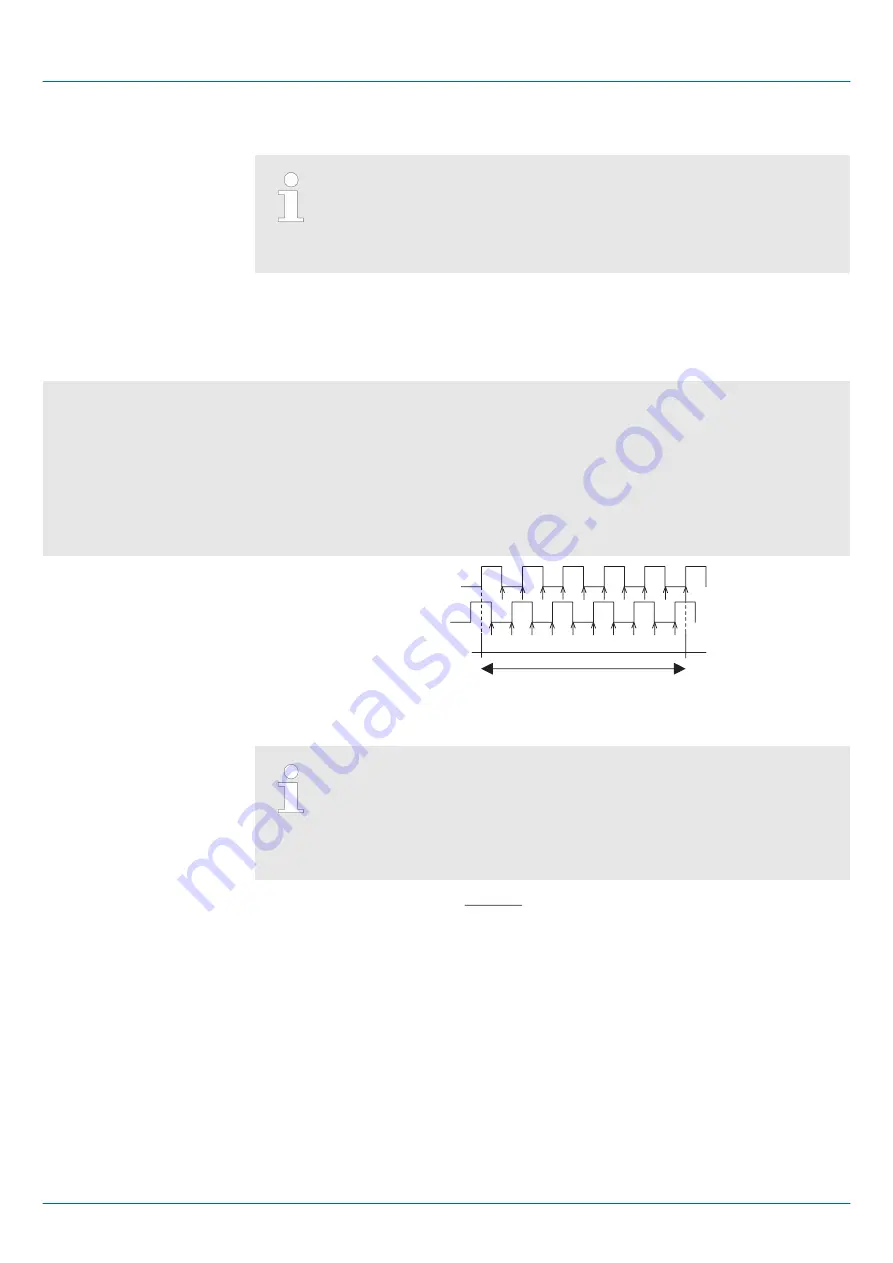
The encoder output pulse will have the following waveform if the set value is 20.
Setting Example
Phase A
Phase B
Sine wave pitch
"
↑
" shows the edge position. In this example, the set value is 20 therefore the number of
↑
is 20.
The upper limit of the encoder signal output frequency (multiplied by 4) is
6.4 Mpps. Do not set a value that would cause the output to exceed 6.4
Mpps. If the output exceeds the upper limit, the overspeed of encoder
output pulse rate alarm (A.511) will be output.
Example: The frequency is as follows if the set value is 20 and the speed
is 1600 mm/s:
1600 mm/s
0.001 mm
= 1600000 = 1.6 Mpps
Because 1.6 Mpps is less than 6.4 Mpps, this value can be used.
These parameters are used for position counting by upper controller. The SERVOPACK
outputs the pulse according to the settings.
If the application does not use this encoder pulse output (e.g. network application), the
functionality can be disabled by the parameter Pn081.1=1.
Important: C-pulse synchronizes to the edge of A/B-pulse.
Sigma-5 and Sigma-7 Series SERVOPACKs
SERVOPACK Set-up
SERVOPACK for Fully-closed Loop Control > Encoder Pulse Output (PAO, PBO, and PCO)
| | Feedback Option Module Type 3 - Manual version C - Revision 0 | en |
75







































































