





























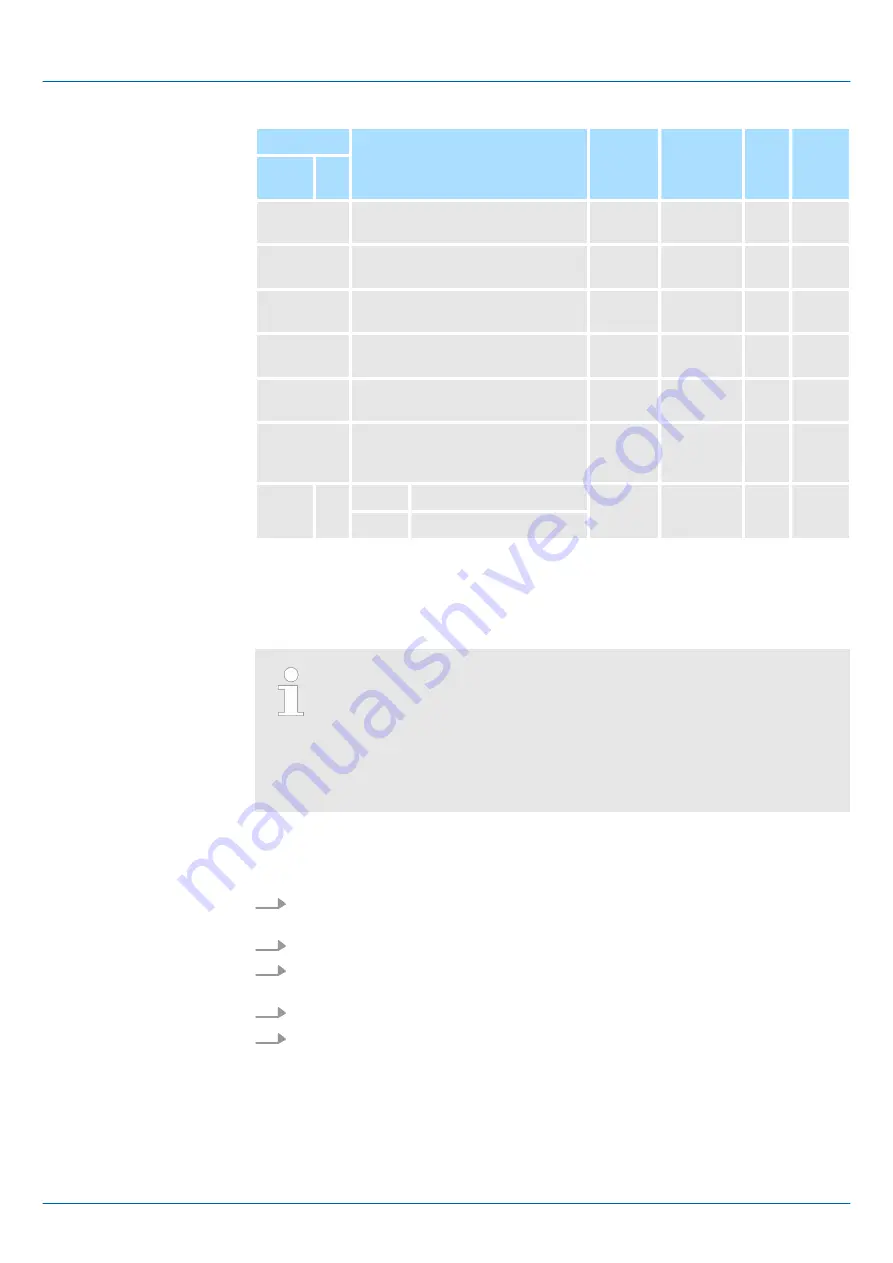
Parameter
Function
Default
Value
Required
value
Cat.
When
ena-
bled
No.
Dig
.
Pn488
Polarity Detection Reference
Waiting Time [ms]
100
*1
O
Imme-
diately
Pn48E
Polarity Detection Range [mm]
10
*1
O
Imme-
diately
Pn490
Polarity Detection Load Level [%]
100
*1
O
Imme-
diately
Pn495
Polarity Detection Confirmation
Force Reference [%]
100
*1
O
Imme-
diately
Pn498
Polarity Detection Allowable Error
Range [deg.]
10
*1
O
Imme-
diately
Pn587
Polarity Detection Execution
Selection for Absolute Linear
Encoder
-
-
-
Imme-
diately
0
0
Does not detect polarity
0
*1
O
Imme-
diately
1
Detects polarity
*1 these settings are dependent on the applications
11.4 Polarity Detection Functionality
Polarity detection should be performed in the following cases:
–
when using a rotary motor without a Hall sensor,
–
in the case of semi-closed loop control with rotary motors if U, V, W
are not wired
–
when using an absolute encoder only the first time
–
when using an incremental encoder always
–
when using a rotary or linear motor without a pole sensor
When using a rotary motor without a hall sensor, polarity detection must be executed.
Make sure the following conditions are satisfied when executing the function.
1.
There is no danger when the rotary motor moves approximately 1/4 turn. In case
the function fails, the rotary motor may move approximately 1.5 turns.
2.
The encoder resolution is 2000 pulses per revolution or more.
3.
Minimum unequal external torque to the rotary motor (5% of the rated torque max-
imum is recommended).
4.
The moment of inertia ratio is within 50 times.
5.
On a horizontal axis.
Rotary Motor
Sigma-5 and Sigma-7 Series SERVOPACKs
SERVOPACK Set-up
Polarity Detection Functionality
| | Feedback Option Module Type 3 - Manual version C - Revision 0 | en |
81







































































