





























Lokommander II Next18 ECU
User Manual firmware 5.10.306
Version 0.5.07
Page 21 of 118
11.
Motor Control
The Lokommander II decoders have Proportional
–
Integral
–
Derivative (PID) motor control loop that is
using the Back Electro-Motive Force (BEMF). This is commonly known as "load compensation". PID
controller can be enabled or disabled with Bit0 of CV60. The factory default value is “1” and that means
PID controller is enabled.
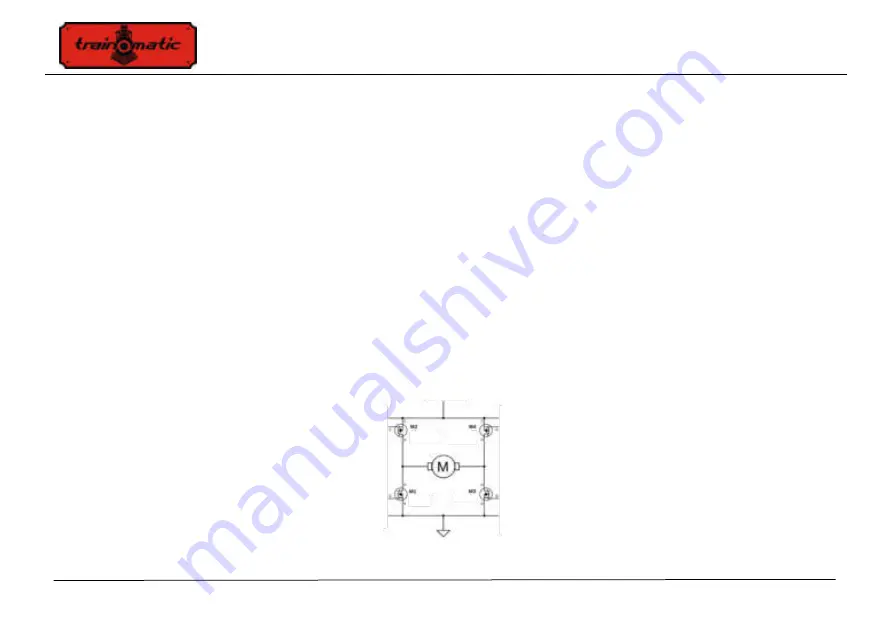
The motor is connected to one of the diagonals of a H-bridge build with 4 FETs (like in
) and the power feed is through the other diagonal. The decoder microcontroller is driving
the FETs with fixed frequency and using pulse width modulation (PWM). The PWM frequency is set by
Bit7 of CV60. Factory default value is “0”
and frequency is
32kHz. For “1” the frequency is 16kHz
.
V+
Figure 4: Generic H bridge





















































