


























SunFounder PiDog Kit, Release 1.0
Warning:
Upgrading the Raspberry Pi OS to
Debian Bullseye
will cause some features to not work, so it is
recommended to continue using the
Debian Buster
version.
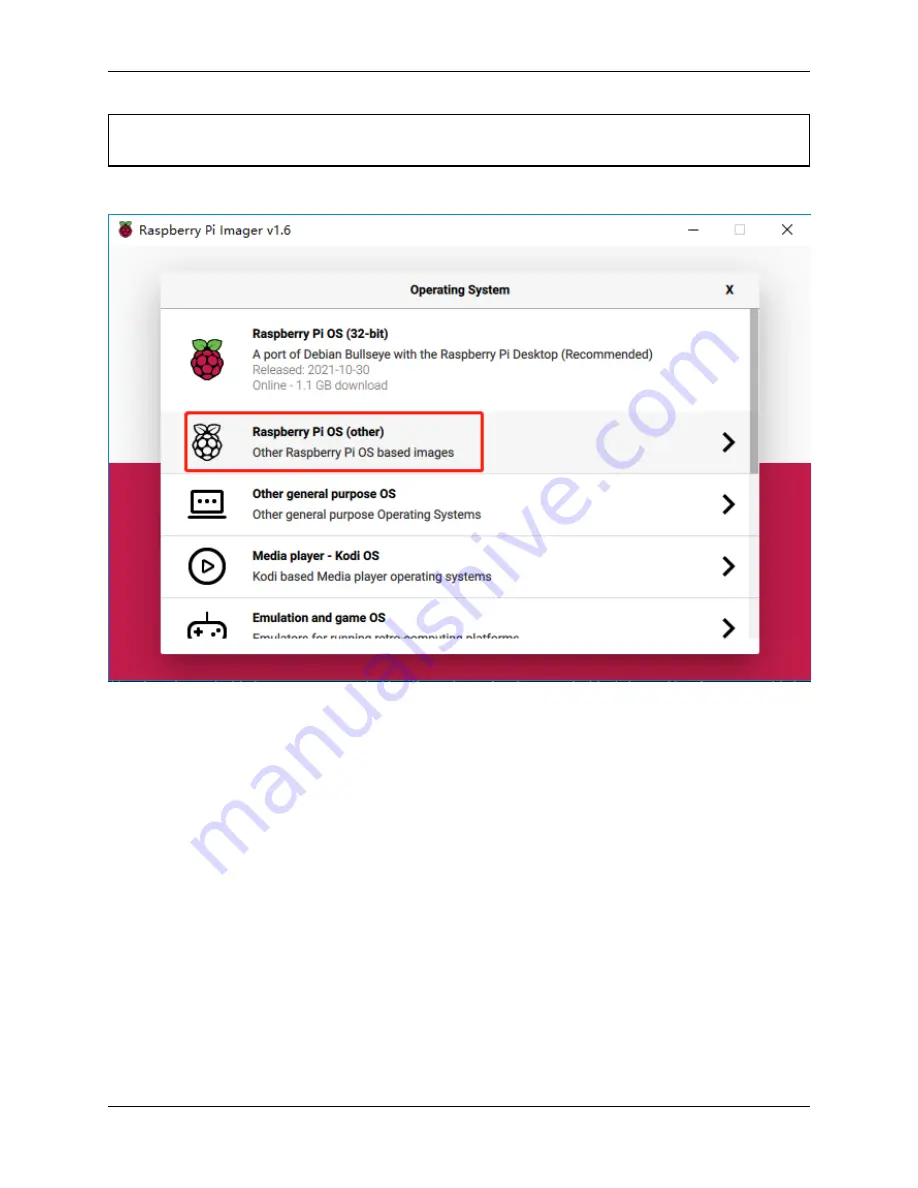
In the Raspberry Pi Imager, click
CHOOSE OS
->
Raspberry Pi OS(other)
.
Scroll down to the end of the newly opened page and you will see
Raspberry Pi OS(Legacy)
and
Raspberry Pi
OS Lite(Legacy)
, these are security updates for Debian Buster, the difference between them is with or without the
desktop. It is recommended to install
Raspberry Pi OS(Legacy)
, the system with the desktop.
8
Chapter 2. Play with Python
Summary of Contents for PiDog
Page 1: ...SunFounder PiDog Kit Release 1 0 sunfounder Jan 09 2023 ...
Page 2: ......
Page 4: ...ii ...
Page 6: ...SunFounder PiDog Kit Release 1 0 Content 2 CONTENTS ...
Page 8: ...SunFounder PiDog Kit Release 1 0 4 Chapter 1 Component List and Assembly Instructions ...
Page 15: ...SunFounder PiDog Kit Release 1 0 Step 7 Click the WRITE button 2 1 Quick Guide on Python 11 ...
Page 92: ...SunFounder PiDog Kit Release 1 0 88 Chapter 2 Play with Python ...
Page 108: ...SunFounder PiDog Kit Release 1 0 104 Chapter 4 Appendix ...







































































