






















Mach-DSP User’s Manual
Document Number: MACH-DSP-9021
Page 90
www.ScannerMAX.com
Adding a high amount of Integral and Position Proportional
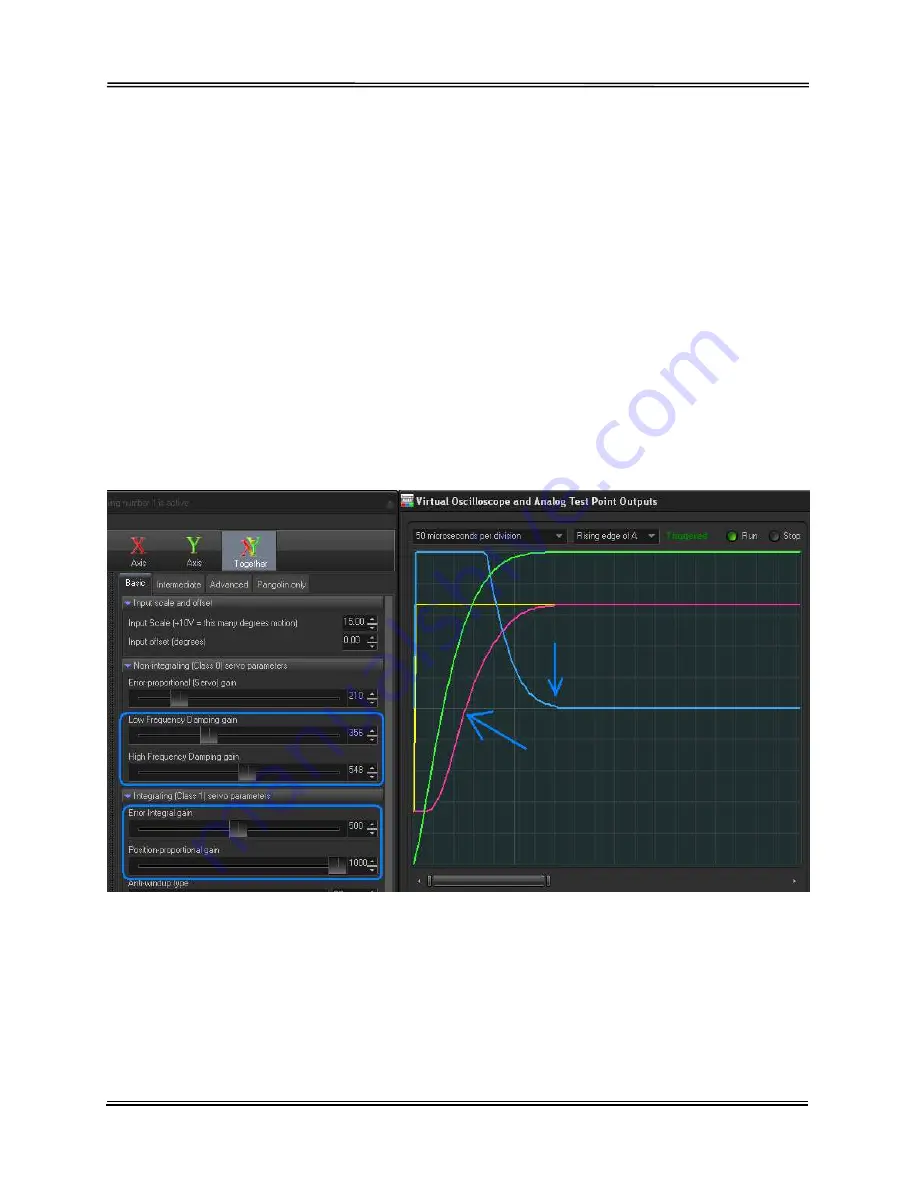
The screen shot below shows how we’ve taken the PD tuning from above, and added a
tremendously high Error Integrator gain. To counterbalance the integrator and keep the
servo loop stable, we’ve also added a tremendously high Position-proportional gain. To
achieve critical damping, Low-Frequency Damping and High Frequency Damping are
also increased.
Notice that despite the Error Integral and Position Proportional gains being increased
tremendously (both of which contribute to acceleration in the same way as Servo Gain),
we still have a 350 microsecond step time.
Also note that the position waveform appears to be asymmetrical in terms of
acceleration and deceleration. The blue arrow that points to the pink trace shows that
the position signal reached the half-way mark at around 125 microseconds. After that,
the remaining 200 microseconds are spent slowing down and coming to a stop. When
the servo is adjusted optimally, ideally the same amount of time is spent accelerating
and decelerating.







































































