





























External Control Signal Connection
OM1305066E26
41
7.4 Auto start settings
For details of settings and usage of the auto start, please
refer to the operating instructions (Teach pendant for arc
welding industrial robots.)
7.5 Status IN/OUT
Dedicated input/output terminals to send signals when the
robot is in specified state or to change robot status
according to the signal received.
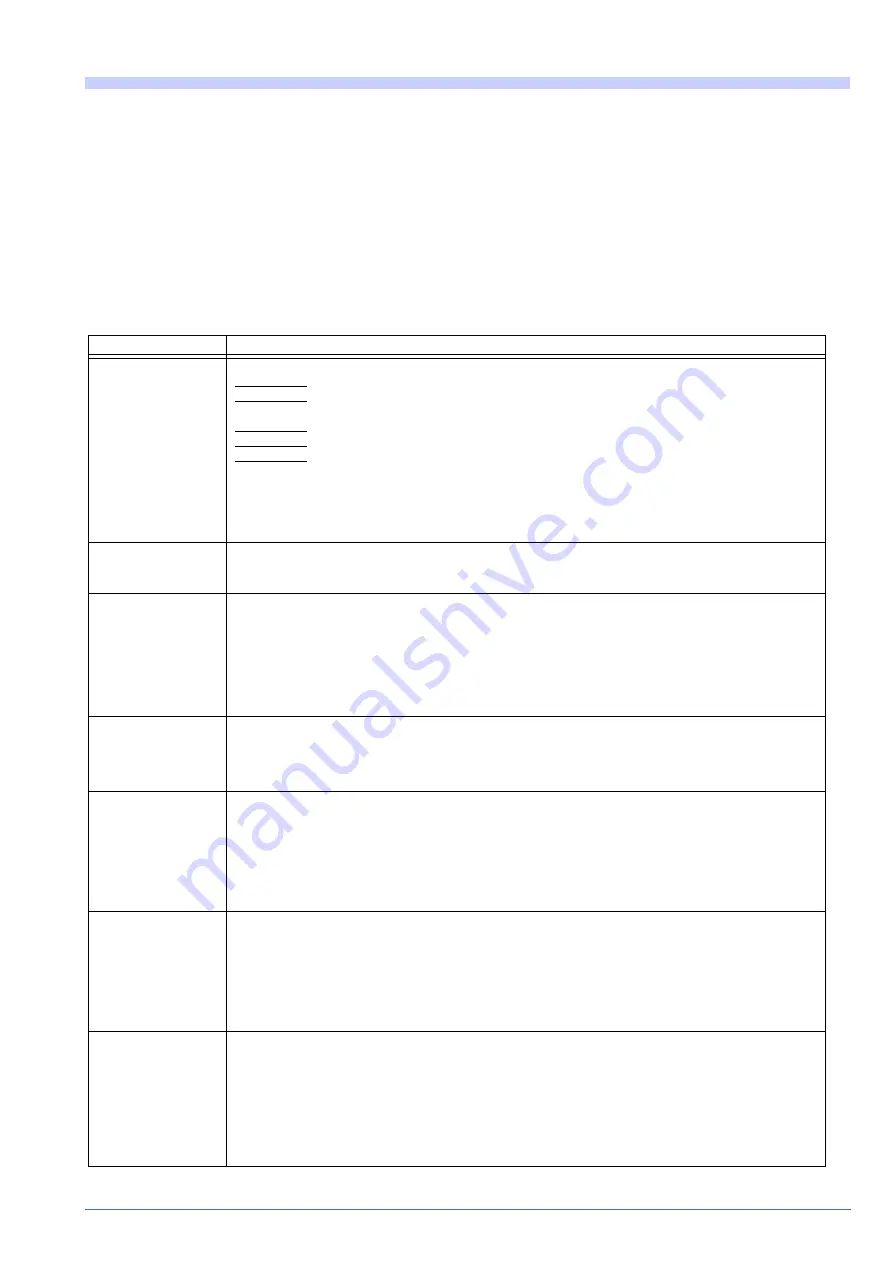
7.5.1 Status INPUT
Dedicated input terminals
Status INPUT
Description
External servo ON
input
Turn ON to enable servo power ON if the following conditions are all satisfied.
Condition 1: Status output signal ‘Ready’ output signal is ON.
Condition 2: Mode select switch is set to operation mode (‘AUTO’ position) and not in Mode error
state.
Condition 3: Mode select is set to auto-operation (in operation mode)
Condition 4: Mode select switch is not switched to ‘TEACH’ position due to override in operation.
Condition 5: The ‘Emergency stop’ input is not ON.
The input signal must satisfy the following conditions.
The input signal must be ON in 0.2 second after the ‘Ready’ output signal goes ON.
The input signal must be kept ON for 0.2 second or more.
If you try to turn on servo within 1.5 seconds after turning it off, “Retry to turn on servo“ is
displayed and servo doesn’t turn on .
Error release input
When the robot is in an error state and the error dialog box is displayed, turn ON this input to close
the dialog box. At that time, the error output goes off if it is in ON state. Input signal is effective
when the signal state is switched and kept for 0.2 second or more.
Start input
Turn ON this input signal to run a program. In a hold state, turn on to restart.
The input signal is ignored under the following conditions.
• The servo power is OFF.
• Auto-operation is not set.
• In error condition.
• Stop input is ON.
• In override state.
Stop input
• Turn ON this input signal to bring the operating robot into a hold state.
• While the signal is ON, re-start, manual operation and trace operation are not operable.
• The robot remains in a hold state even if this signal is turned OFF.
• To restart operation, turn ON the start input signal.
Operating mode
input
• It is to switch the mode from teaching mode to operation mode.
• Use this input when the robot is in teaching mode and operation mode is desired.
• When the input signal is turned ON, a message to switch the mode select switch to operation
mode appears.
• Switch the mode select switch to ‘AUTO’ or turn OFF the operating mode input to close the
message box.
Please be advised that while the message box is displayed, the robot is in the error state.
Teaching mode
input
• It is to switch the mode from operation mode to teaching mode.
• Use this input when the robot is in operation mode and teaching mode is desired.
• When the input signal is turned ON, a message to switch the mode select switch to teaching
mode appears.
• Switch the mode select switch to ‘TEACH’ or turn OFF the teaching mode input to close the
message box.
Please be advised that while the message box is displayed, the robot is in the error state.
OPR confirm input
In case of using the operation box, turn ON this input signal to release the interlock occurred at the
time of switching to AUTO mode.
(You can also use the AUTO mode switch on the operation box to release the interlock.)
< Note >
• The interlock at the time of switching to AUTO mode occurs if the controller is equipped with the
operation box either as standard (for UL or CE specification) or as optional.
• It is necessary to complete the management settings for the operation box to enable this input.
Please refer to the operating instructions (Operation) for details.







































































