




























Commissioning
Positioning mode
Functions available
5
59
SW-HB 13.0002-EN EN 3.0
5.4
Positioning mode
Note!
You can skip this chapter, if you are only using speed or torque control.
5.4.1
Functions available
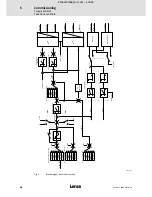
In positioning mode, the speed control is superimposed by a positioning control and a
position is selected which is to be automatically approached by the motor, i.e. without
external control. In this operating mode, the controller cascade of the 931E servo
positioning controller is extended, as shown in figure 6:
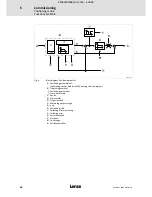
ƒ
The position controller is designed as a proportional-action controller (short P
controller). The current position is calculated from the data of the internal encoder
evaluation. The position difference is processed by the position controller and
transmitted as speed setpoint to the speed controller.
ƒ
The trajectory generator calculates the traversing profile necessary to approach the
target position from the current position and with the current speed. It provides the
setpoint position for the position controller and a precontrol speed for the speed
controller to improve the dynamic performance of the control in case of fast
positioning processes.
ƒ
The positioning control provides a large number of messages which are required for
the external control, e.g. a target reached message and a following error message.
efesotomasyon.com - Lenze







































































