





























KINOVA
®
Gen3 Ultra lightweight robot
User Guide
39
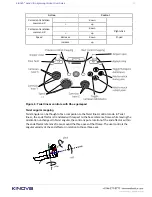
connected with screws to a circular mounting plate with through holes for mounting to surfaces
and a slot to put a clamp between the robot and the plate for tabletop mounting.
The mounting plate can also be removed from the controller by removing the screws, giving
access to the four mounting holes and allowing the controller to be mounted directly on the
surface.
A mating interface to which the base shell connects establishes an electrical connection
between the base shell and the controller. The controller also contains the key components for
the control and connectivity of the arm.
Note:
The controller mating interface needs to be kept free of dust and moisture to protect the
electrical contacts. Wipe down with a soft dry cloth to keep the interface clean.
The internal components of the controller include:
• CPU
• Wi-Fi / Bluetooth adapter (Only Wi-Fi is used at present)
• Ethernet switch
• USB hub
• temperature sensor
• accelerometer/gyroscope
A Linux web server runs on the controller and manages connectivity between the controller and
the arm devices, and between the controller and an external computer.
Controller quick connect system
This section describes the controller quick connect system.
The base of the robot is equipped with a quick connect system that allows for simple connect /
disconnect of the base shell and controller. This allows the arm to be quickly detached from the
mounting point of the arm without disconnecting any cables. This can be useful for transport,
for removal of the arm for servicing or for convenient re-siting of the arm between multiple
installation sites.
Note:
Be careful to avoid damage to the electrical contacts on the mating interface of the
controller when the base shell is disconnected. Make sure to keep the surface dry and free from
dust.
Figure 11: Mounting plate





















































