





























KINOVA
®
Gen3 Ultra lightweight robot
User Guide
132
Guidance for advanced users
This section gathers together reference information on advanced topics.
Introduction
The following contents are intended for advanced users.
7 DoF singularity configurations
This section describes the singularity configurations of the 7 DoF robot.
Singularity configurations overview
Singularities generally occur when a particular angular configuration of the robot causes
axes to be aligned, causing the robot to lose degrees of freedom and experience limitations in
movement in some directions while operating the robot in Cartesian mode. There are many
ways that this could potentially happen, and an exhaustive listing would be difficult. The
following table highlights some important singularities for the 7 DoF robot, explaining how they
occur and how the robot behavior is altered near the singularity while in Cartesian mode.
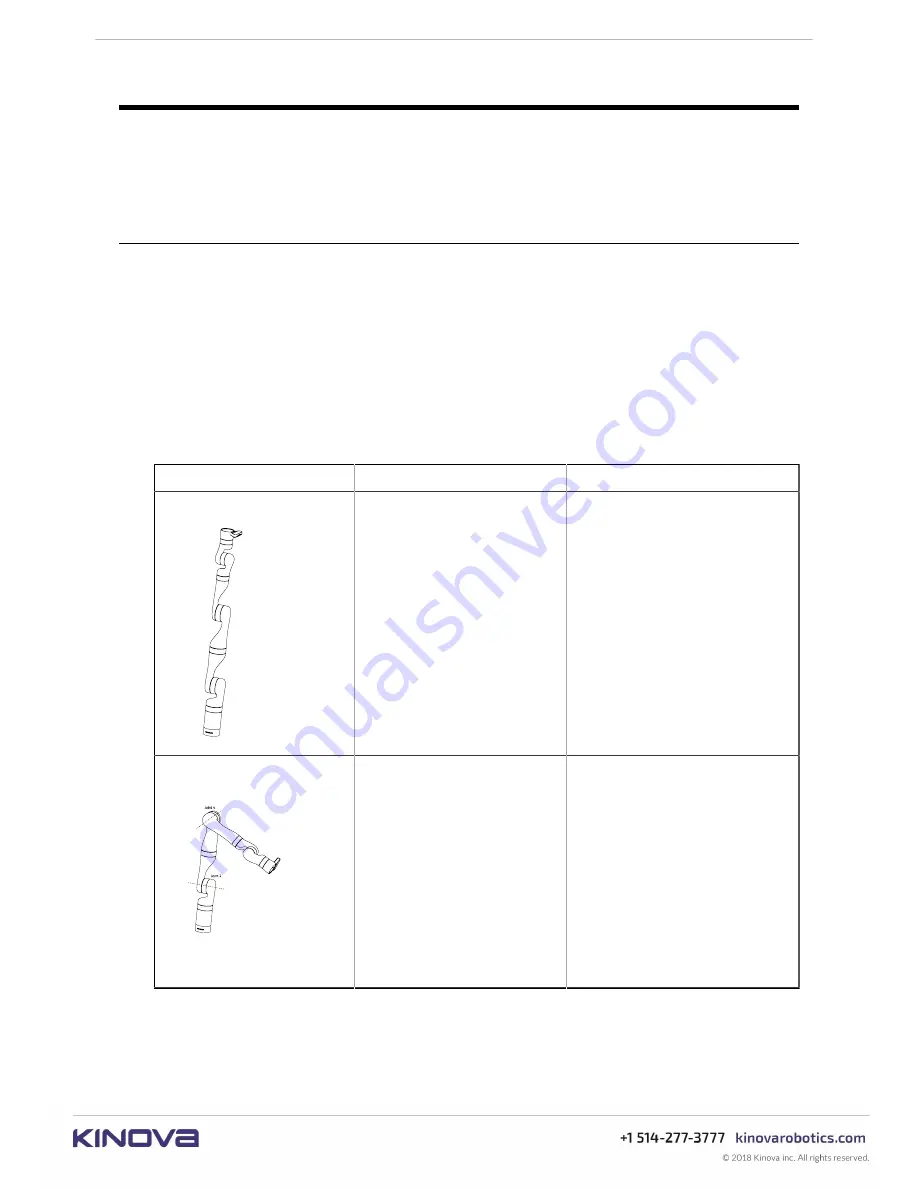
Table 37: Selected singularity configurations description
Singularity
Description
Robot behavior
Boundary singularity
The arm is at full reach. Joint
4 (elbow) is at 0°. The arm
cannot move any farther in
the direction it is currently
reaching out.
Due to singularity avoidance, it’s
not possible to bring the elbow
to 0° in Cartesian mode.
Joints 2 and 3 singularity
Joint 2 is at 0° so joints 1 and
3 are perfectly aligned and
have the same effect.
Joint 3 is at 90° or at 270° so
that the axes of joint 2 and
joint 4 are perpendicular.
The robot can no longer
move purely along an axis in
translation.
Due to singularity avoidance, it’s
not possible to bring joint 3 near
90° or 270° when joint 2 is near
0° (or vice versa, to bring joint 2
near 0° when joint 3 is near 90°
or 270°) in Cartesian mode.
The control algorithms will try to
avoid the singularity by moving
joint 2 away from 0° and joint
3 away from 90° or 270° while
moving in null space.





















































