





























Goodrive350-UL Series VFD
Function parameter list
-146-
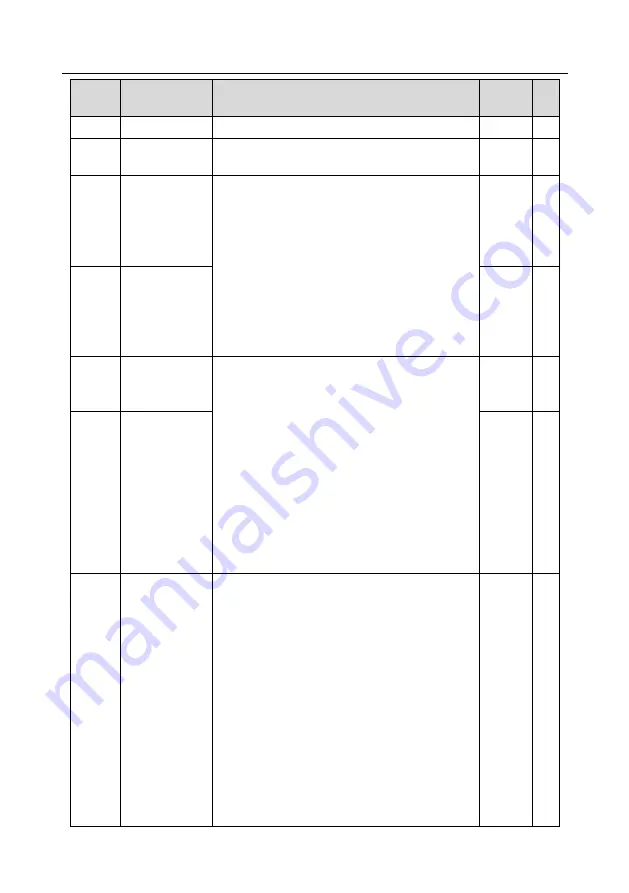
Function
code
Name
Detailed parameter description
Default
value
Modi
fy
output frequency)
P03.06
Speed loop
output filter
0–8 (corresponds to 0–2^8/10ms)
0
○
P03.07
Vector control
slip
compensation
coefficient
(motoring)
Slip compensation coefficient is used to adjust the
slip frequency of vector control to improve speed
control precision. This parameter can be used to
control speed offset.
Setting range: 50–200%
100%
○
P03.08
Vector control
slip
compensation
coefficient
(generating)
100%
○
P03.09
Current loop
proportional
coefficient P
Note:
1. These two parameters are used to adjust PI
parameters of current loop; it affects dynamic
response speed and control precision of the system
directly. The default value needs no adjustment
under common conditions;
2. Fit for SVC mode 0 (P00.00=0) and VC mode
(P00.00=3);
3. The value of this function code will be updated
automatically after parameter autotuning of
synchronous motor is done.
Setting range: 0–65535
1000
○
P03.10
Current loop
integral
coefficient I
1000
○
P03.11
Torque setting
mode selection
0–1: Set via keypad (P03.12)
2: Set via AI1 (100% corresponds to three times of
rated motor current)
3: Set via AI2 (the same as above)
4: Set via AI3 (the same as above)
5: Set via pulse frequency HDIA (the same as
above)
6: Set via multi-step torque (the same as above)
7: Set via Modbus communication (the same as
above)
8: Set via PROFIBUS/CANopen/DeviceNet
communication (the same as above)
9: Set via Ethernet communication (the same as
above)
0
○







































































