





























Nix Product Manual |
Wiring and Connections
INGENIA | 01/22/2019
99
7.5.6 Torque off input (custom purchase order)
As assembly option (custom purchase order)
, the Nix Servo Drive can be provided with a torque off input. This
input is used to prevent motor torque in an emergency event while Nix remains connected to the power supply.
The torque off input can be implemented through input
GPI2
. When a
LOW level
voltage is detected in this input,
the transistors of the power stage are turned off
and a STO fault is notified. During this state, no torque will be
applied to the motor no matter configuration, or state of a command source. This will slow down the motor
shaft until it stops under its own inertia and frictional forces. This input should not be confused with a digital input
configured as enable input, because enable input is firmware controlled and does not guarantee intrinsic safety as
it can be reconfigured by a user.
GPI2 input reads a logic low state (0 V < V
in
< 1 V) by defect, so the input must be connected to a logic high level (4 V
< V
in
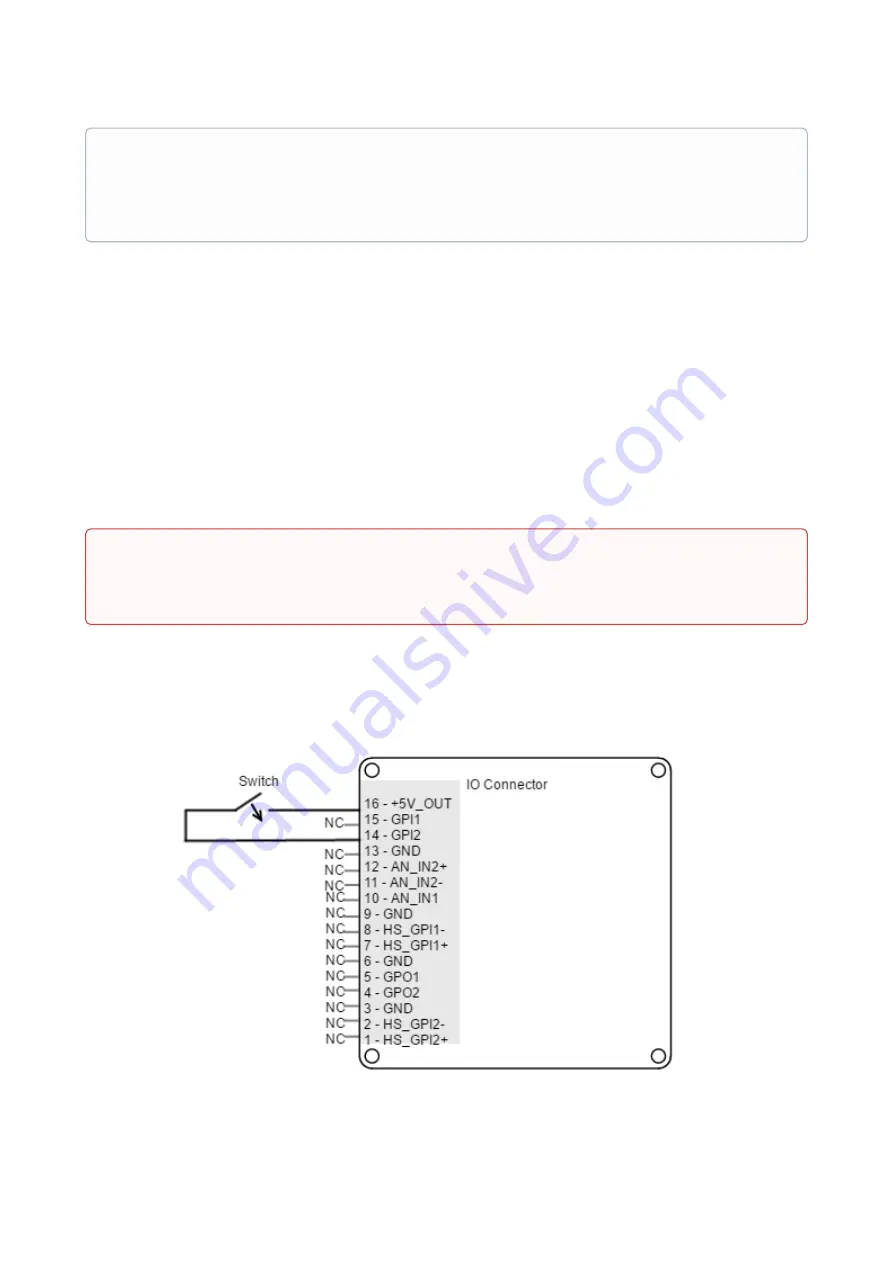
< 24 V) to activate the power stage. Next figures show two examples of connection of the torque off input, a
self-supplied option and an external supplied option.
Free-wheeling diode
It is recommended to use a freewheeling diode in anti-parallel with the brake to prevent inductive kicking
(voltage rise when current through the brake inductance falls to zero). Standard rectifier diodes such as
are appropriated for the application.
Not a Safe Torque Off
The torque off input is not a safety critical torque off input (Safe Torque Off). It should not be used for
safety critical applications.







































































