





























56
Parameter Descriptions
Honeywell
9
4.7
DC
BRAKING
TIME
AT
STOP
0 =
DC brake is not in use
>0 =
DC brake is in use and its function depends on the Stop function,
(par. 2.3). The DC braking time is determined with this parameter.
Par. 2.3 = 0 (Stop function = Coasting):
After the stop command, the motor coasts to a stop without control from the
inverter.
With the DC injection, the motor can be electrically stopped in the shortest
possible time, without using an optional external braking resistor.
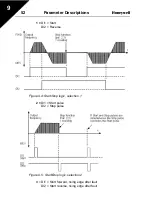
The braking time is scaled by the frequency when the DC-braking starts. If the
frequency is greater than the nominal frequency of the motor, the set value of
parameter 4.7 determines the braking time. When the frequency is 10% of the
nominal, the braking time is 10% of the set value of parameter 4.7.
Figure 9.8: DC-braking time when Stop mode = Coasting
Par. 2.3 = 1 (Stop function = Ramp):
After the Stop command, the speed of the motor is reduced according to the
set deceleration parameters, if the inertia of of the motor and load allows that,
to the speed defined with parameter 4.6, where the DC-braking starts.
fn
fn
t
t
t = 1 x par. 4.7
t = 0,1 x par. 4.7
0,1 x fn
RUN
STOP
RUN
STOP
Output frequency
Motor speed
Output frequency
Motor speed
DC-braking ON
DC-braking ON
fout
fout







































































