





























46
Parameter Descriptions
Honeywell
9
9. PARAMETER DESCRIPTIONS
On the next pages you can find the descriptions of certain parameters. The descrip-
tions have been arranged according to parameter group and number.
9.1 MOTOR SETTINGS (CONTROL PANEL: MENU PAR -> P1)
1.8
M
OTOR
CONTROL
MODE
With this parameter the user can select the motor control mode. The selec-
tions are:
0 = Frequency control:
The I/O terminal, keypad and fieldbus references are frequency refer-
ences and the inverter controls the output frequency (output frequency
resolution = 0.01 Hz)
1 = Speed control:
The I/O terminal, keypad and fieldbus references are speed references
and the inverter controls the motor speed.
1.9
U/
F
RATIO
SELECTION
There are three selections for this parameter:
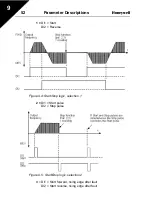
0 = Linear:
The voltage of the motor changes linearly with the frequency in the
constant flux area from 0 Hz to the field weakening point where the
nominal voltage is supplied to the motor. Linear U/f ratio should be
used in constant torque applications. See Figure 9.1.
This default setting should be used if there is no special need for an-
other setting.
1 = Squared:
The voltage of the motor changes following a squared curve form with
the frequency in the area from 0 Hz to the field weakening point where
the nominal voltage is also supplied to the motor. The motor runs un-
der magnetised below the field weakening point and produces less
torque, power losses and electromechaniqal noise. Squared U/f ratio
can be used in applications where torque demand of the load is pro-
portional to the square of the speed, e.g in centrifugal fans and pumps







































































